VS15: Infrastructure Enhanced Cooperative Adaptive Cruise Control
This service package adds Infrastructure to Vehicle (I2V) communications to Cooperative Adaptive Cruise Control systems so that strings of compatible CACC-equipped vehicles can be more efficiently formed and cooperating vehicles gain access to speed recommendations and traffic control status from the infrastructure, further enhancing traffic flow stability and improving highway capacity and throughput. Speed recommendations provided by the infrastructure can be used to stabilize traffic flow, reducing speed differentials and enhancing throughput along a route that includes a bottleneck. Access to traffic control information such as signal phase and timing enables synchronized starts by adjacent CACC-equipped strings of vehicles, increasing intersection throughput. The infrastructure can also assist with broader coordination between CACC-equipped vehicles, enabling strings of vehicles to be more efficiently formed that share performance parameters and destinations.
Relevant Regions: Australia, Canada, European Union, and United States
- Enterprise
- Functional
- Physical
- Goals and Objectives
- Needs and Requirements
- Sources
- Security
- Standards
- System Requirements
Enterprise
Development Stage Roles and Relationships
Installation Stage Roles and Relationships
Operations and Maintenance Stage Roles and Relationships
(hide)
| Source | Destination | Role/Relationship |
|---|---|---|
| Basic Vehicle Maintainer | Basic Vehicle | Maintains |
| Basic Vehicle Manager | Basic Vehicle | Manages |
| Basic Vehicle Manager | Driver | System Usage Agreement |
| Basic Vehicle Owner | Basic Vehicle Maintainer | System Maintenance Agreement |
| Basic Vehicle Owner | Basic Vehicle Manager | Operations Agreement |
| Basic Vehicle Owner | Driver | Application Usage Agreement |
| Basic Vehicle Owner | Driver | Vehicle Operating Agreement |
| Basic Vehicle Owner | Vehicle Maintainer | Maintenance Data Exchange Agreement |
| Basic Vehicle Owner | Vehicle Owner | Expectation of Data Provision |
| Basic Vehicle Owner | Vehicle User | Service Usage Agreement |
| Basic Vehicle Supplier | Basic Vehicle Owner | Warranty |
| Connected Vehicle Roadside Equipment Maintainer | Connected Vehicle Roadside Equipment | Maintains |
| Connected Vehicle Roadside Equipment Manager | Connected Vehicle Roadside Equipment | Manages |
| Connected Vehicle Roadside Equipment Owner | Connected Vehicle Roadside Equipment Maintainer | System Maintenance Agreement |
| Connected Vehicle Roadside Equipment Owner | Connected Vehicle Roadside Equipment Manager | Operations Agreement |
| Connected Vehicle Roadside Equipment Owner | Driver | Application Usage Agreement |
| Connected Vehicle Roadside Equipment Owner | ITS Roadway Equipment Maintainer | Maintenance Data Exchange Agreement |
| Connected Vehicle Roadside Equipment Owner | ITS Roadway Equipment Owner | Information Exchange and Action Agreement |
| Connected Vehicle Roadside Equipment Owner | ITS Roadway Equipment User | Service Usage Agreement |
| Connected Vehicle Roadside Equipment Owner | Traffic Management Center Maintainer | Maintenance Data Exchange Agreement |
| Connected Vehicle Roadside Equipment Owner | Traffic Management Center Owner | Information Exchange and Action Agreement |
| Connected Vehicle Roadside Equipment Owner | Traffic Management Center User | Service Usage Agreement |
| Connected Vehicle Roadside Equipment Owner | Traffic Operations Personnel | Application Usage Agreement |
| Connected Vehicle Roadside Equipment Owner | Vehicle Maintainer | Maintenance Data Exchange Agreement |
| Connected Vehicle Roadside Equipment Owner | Vehicle Owner | Information Exchange and Action Agreement |
| Connected Vehicle Roadside Equipment Owner | Vehicle User | Service Usage Agreement |
| Connected Vehicle Roadside Equipment Supplier | Connected Vehicle Roadside Equipment Owner | Warranty |
| Driver | Basic Vehicle | Operates |
| Driver | Roadway Owner | Expectation of Roadway Condition Management |
| Driver | Vehicle | Operates |
| ITS Roadway Equipment Maintainer | ITS Roadway Equipment | Maintains |
| ITS Roadway Equipment Manager | ITS Roadway Equipment | Manages |
| ITS Roadway Equipment Owner | Connected Vehicle Roadside Equipment Maintainer | Maintenance Data Exchange Agreement |
| ITS Roadway Equipment Owner | Connected Vehicle Roadside Equipment Owner | Information Exchange and Action Agreement |
| ITS Roadway Equipment Owner | Connected Vehicle Roadside Equipment User | Service Usage Agreement |
| ITS Roadway Equipment Owner | ITS Roadway Equipment Maintainer | System Maintenance Agreement |
| ITS Roadway Equipment Owner | ITS Roadway Equipment Manager | Operations Agreement |
| ITS Roadway Equipment Owner | Traffic Management Center Maintainer | Maintenance Data Exchange Agreement |
| ITS Roadway Equipment Owner | Traffic Management Center Owner | Information Exchange and Action Agreement |
| ITS Roadway Equipment Owner | Traffic Management Center User | Service Usage Agreement |
| ITS Roadway Equipment Owner | Traffic Operations Personnel | Application Usage Agreement |
| ITS Roadway Equipment Supplier | ITS Roadway Equipment Owner | Warranty |
| Other Vehicles Maintainer | Other Vehicles | Maintains |
| Other Vehicles Manager | Other Vehicles | Manages |
| Other Vehicles Owner | Driver | Application Usage Agreement |
| Other Vehicles Owner | Driver | Vehicle Operating Agreement |
| Other Vehicles Owner | Other Vehicles Maintainer | System Maintenance Agreement |
| Other Vehicles Owner | Other Vehicles Manager | Operations Agreement |
| Other Vehicles Owner | Vehicle Maintainer | Maintenance Data Exchange Agreement |
| Other Vehicles Owner | Vehicle Owner | Expectation of Data Provision |
| Other Vehicles Owner | Vehicle User | Service Usage Agreement |
| Other Vehicles Supplier | Other Vehicles Owner | Warranty |
| Roadway Maintainer | Roadway Environment | Maintains |
| Roadway Manager | Roadway Environment | Manages |
| Roadway Owner | Roadway Maintainer | System Maintenance Agreement |
| Roadway Owner | Roadway Manager | Operations Agreement |
| Traffic Management Center Maintainer | Traffic Management Center | Maintains |
| Traffic Management Center Manager | Traffic Management Center | Manages |
| Traffic Management Center Manager | Traffic Operations Personnel | System Usage Agreement |
| Traffic Management Center Owner | Connected Vehicle Roadside Equipment Maintainer | Maintenance Data Exchange Agreement |
| Traffic Management Center Owner | Connected Vehicle Roadside Equipment Owner | Information Provision Agreement |
| Traffic Management Center Owner | Connected Vehicle Roadside Equipment User | Service Usage Agreement |
| Traffic Management Center Owner | ITS Roadway Equipment Maintainer | Maintenance Data Exchange Agreement |
| Traffic Management Center Owner | ITS Roadway Equipment Owner | Information Provision Agreement |
| Traffic Management Center Owner | ITS Roadway Equipment User | Service Usage Agreement |
| Traffic Management Center Owner | Traffic Management Center Maintainer | System Maintenance Agreement |
| Traffic Management Center Owner | Traffic Management Center Manager | Operations Agreement |
| Traffic Management Center Owner | Transportation Information Center Maintainer | Maintenance Data Exchange Agreement |
| Traffic Management Center Owner | Transportation Information Center Owner | Information Provision Agreement |
| Traffic Management Center Owner | Transportation Information Center User | Service Usage Agreement |
| Traffic Management Center Supplier | Traffic Management Center Owner | Warranty |
| Traffic Operations Personnel | Traffic Management Center | Operates |
| Transportation Information Center Maintainer | Transportation Information Center | Maintains |
| Transportation Information Center Manager | Transportation Information Center | Manages |
| Transportation Information Center Owner | Driver | Application Usage Agreement |
| Transportation Information Center Owner | Transportation Information Center Maintainer | System Maintenance Agreement |
| Transportation Information Center Owner | Transportation Information Center Manager | Operations Agreement |
| Transportation Information Center Owner | Vehicle Maintainer | Maintenance Data Exchange Agreement |
| Transportation Information Center Owner | Vehicle Owner | Information Provision Agreement |
| Transportation Information Center Owner | Vehicle User | Service Usage Agreement |
| Transportation Information Center Supplier | Transportation Information Center Owner | Warranty |
| Vehicle Characteristics Maintainer | Vehicle Characteristics | Maintains |
| Vehicle Characteristics Manager | Vehicle Characteristics | Manages |
| Vehicle Characteristics Owner | Vehicle Characteristics Maintainer | System Maintenance Agreement |
| Vehicle Characteristics Owner | Vehicle Characteristics Manager | Operations Agreement |
| Vehicle Characteristics Supplier | Vehicle Characteristics Owner | Warranty |
| Vehicle Maintainer | Vehicle | Maintains |
| Vehicle Manager | Driver | System Usage Agreement |
| Vehicle Manager | Vehicle | Manages |
| Vehicle Owner | Basic Vehicle Maintainer | Maintenance Data Exchange Agreement |
| Vehicle Owner | Basic Vehicle Owner | Expectation of Data Provision |
| Vehicle Owner | Basic Vehicle User | Service Usage Agreement |
| Vehicle Owner | Connected Vehicle Roadside Equipment Maintainer | Maintenance Data Exchange Agreement |
| Vehicle Owner | Connected Vehicle Roadside Equipment Owner | Expectation of Data Provision |
| Vehicle Owner | Connected Vehicle Roadside Equipment User | Service Usage Agreement |
| Vehicle Owner | Driver | Application Usage Agreement |
| Vehicle Owner | Driver | Vehicle Operating Agreement |
| Vehicle Owner | Other Vehicles Maintainer | Maintenance Data Exchange Agreement |
| Vehicle Owner | Other Vehicles Owner | Expectation of Data Provision |
| Vehicle Owner | Other Vehicles User | Service Usage Agreement |
| Vehicle Owner | Vehicle Maintainer | System Maintenance Agreement |
| Vehicle Owner | Vehicle Manager | Operations Agreement |
| Vehicle Supplier | Vehicle Owner | Warranty |
Functional
This service package includes the following Functional View PSpecs:
Physical
The physical diagram can be viewed in SVG or PNG format and the current format is SVG.SVG Diagram
PNG Diagram
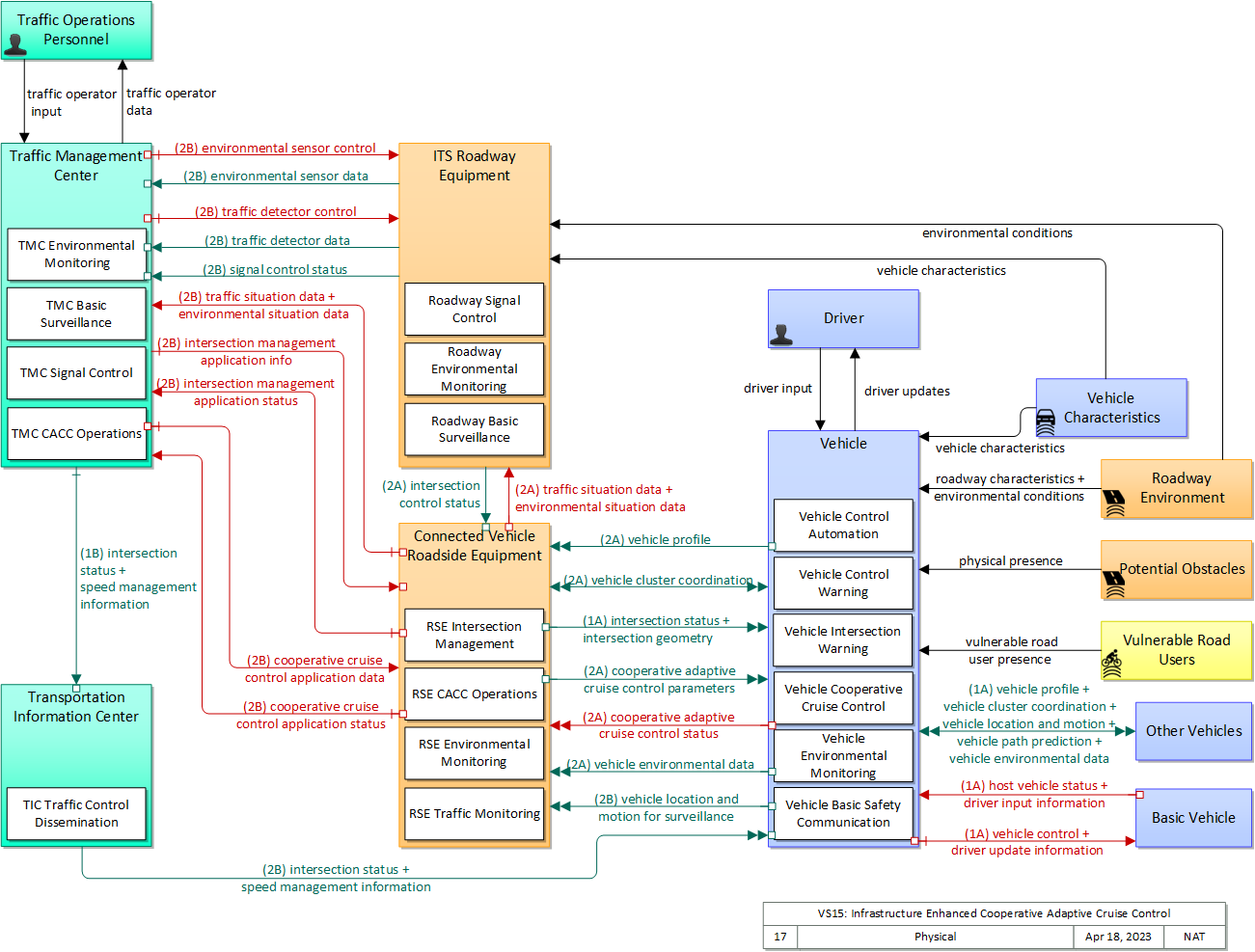
Includes Physical Objects:
| Physical Object | Class | Description |
|---|---|---|
| Basic Vehicle | Vehicle | 'Basic Vehicle' represents a complete operating vehicle. It includes the vehicle platform that interfaces with and hosts ITS electronics and all of the driver convenience and entertainment systems, and other non-ITS electronics on-board the vehicle. Interfaces represent both internal on-board interfaces between ITS equipment and other vehicle systems and other passive and active external interfaces or views of the vehicle that support vehicle/traffic monitoring and management. External interfaces may also represent equipment that is carried into the vehicle (e.g., a smartphone that is brought into the vehicle). Internal interfaces are often implemented through a vehicle databus, which is also included in this object. Note that 'Vehicle' represents the general functions and interfaces that are associated with personal automobiles as well as commercial vehicles, emergency vehicles, transit vehicles, and other specialized vehicles. |
| Connected Vehicle Roadside Equipment | Field | 'Connected Vehicle Roadside Equipment' (CV RSE) represents the Connected Vehicle roadside devices that are used to send messages to, and receive messages from, nearby vehicles using Dedicated Short Range Communications (DSRC) or other alternative wireless communications technologies. Communications with adjacent field equipment and back office centers that monitor and control the RSE are also supported. This device operates from a fixed position and may be permanently deployed or a portable device that is located temporarily in the vicinity of a traffic incident, road construction, or a special event. It includes a processor, data storage, and communications capabilities that support secure communications with passing vehicles, other field equipment, and centers. |
| Driver | Vehicle | The 'Driver' represents the person that operates a vehicle on the roadway. Included are operators of private, transit, commercial, and emergency vehicles where the interactions are not particular to the type of vehicle (e.g., interactions supporting vehicle safety applications). The Driver originates driver requests and receives driver information that reflects the interactions which might be useful to all drivers, regardless of vehicle classification. Information and interactions which are unique to drivers of a specific vehicle type (e.g., fleet interactions with transit, commercial, or emergency vehicle drivers) are covered by separate objects. |
| ITS Roadway Equipment | Field | 'ITS Roadway Equipment' represents the ITS equipment that is distributed on and along the roadway that monitors and controls traffic and monitors and manages the roadway. This physical object includes traffic detectors, environmental sensors, traffic signals, highway advisory radios, dynamic message signs, CCTV cameras and video image processing systems, grade crossing warning systems, and ramp metering systems. Lane management systems and barrier systems that control access to transportation infrastructure such as roadways, bridges and tunnels are also included. This object also provides environmental monitoring including sensors that measure road conditions, surface weather, and vehicle emissions. Work zone systems including work zone surveillance, traffic control, driver warning, and work crew safety systems are also included. |
| Other Vehicles | Vehicle | 'Other Vehicle OBEs' represents other connected vehicles that are communicating with the host vehicle. This includes all connected motorized vehicles including passenger cars, trucks, and motorcycles and specialty vehicles (e.g., maintenance vehicles, transit vehicles) that also include the basic 'Vehicle OBE' functionality that supports V2V communications. This object provides a source and destination for information transfers between connected vehicles. The host vehicle on-board equipment, represented by the Vehicle OBE physical object, sends information to, and receives information from the Other Vehicle OBEs to model all connected vehicle V2V communications in ARC-IT. |
| Potential Obstacles | Field | 'Potential Obstacles' represents any object that possesses the potential of being sensed and struck and thus also possesses physical attributes. Potential Obstacles include roadside obstructions, debris, animals, infrastructure elements (barrels, cones, barriers, etc.) or any other element that is in a potential path of the vehicle. Note that roadside objects and pieces of equipment that can become obstacles in a vehicle's path can include materials, coatings, or labels (e.g., barcodes) that will improve the performance of the vehicle-based sensors that must detect and avoid these obstacles. See also 'Vulnerable Road Users' that more specifically represents the physical properties of shared users of the roadway that must also be detected. |
| Roadway Environment | Field | 'Roadway Environment' represents the physical condition and geometry of the road surface, markings, signs, and other objects on or near the road surface. It also represents the environmental conditions immediately surrounding the roadway. The roadway environment must be sensed and interpreted to support automated vehicle services. Surrounding conditions may include fog, ice, snow, rain, wind, etc. which will influence the way in which a vehicle can be safely operated on the roadway. The roadway environment must be monitored to enable corrective action and information dissemination regarding roadway conditions which may adversely affect travel. Infrastructure owner/operators can improve the roadway environment to improve the performance and accuracy of vehicle-based sensors that must sense and interpret this environment. Improvements could include changes in the shape, size, design, and materials used in signs, pavement markings, and other road features. |
| Traffic Management Center | Center | The 'Traffic Management Center' monitors and controls traffic and the road network. It represents centers that manage a broad range of transportation facilities including freeway systems, rural and suburban highway systems, and urban and suburban traffic control systems. It communicates with ITS Roadway Equipment and Connected Vehicle Roadside Equipment (RSE) to monitor and manage traffic flow and monitor the condition of the roadway, surrounding environmental conditions, and field equipment status. It manages traffic and transportation resources to support allied agencies in responding to, and recovering from, incidents ranging from minor traffic incidents through major disasters. |
| Traffic Operations Personnel | Center | 'Traffic Operations Personnel' represents the people that operate a traffic management center. These personnel interact with traffic control systems, traffic surveillance systems, incident management systems, work zone management systems, and travel demand management systems. They provide operator data and command inputs to direct system operations to varying degrees depending on the type of system and the deployment scenario. |
| Transportation Information Center | Center | The 'Transportation Information Center' collects, processes, stores, and disseminates transportation information to system operators and the traveling public. The physical object can play several different roles in an integrated ITS. In one role, the TIC provides a data collection, fusing, and repackaging function, collecting information from transportation system operators and redistributing this information to other system operators in the region and other TICs. In this information redistribution role, the TIC provides a bridge between the various transportation systems that produce the information and the other TICs and their subscribers that use the information. The second role of a TIC is focused on delivery of traveler information to subscribers and the public at large. Information provided includes basic advisories, traffic and road conditions, transit schedule information, yellow pages information, ride matching information, and parking information. The TIC is commonly implemented as a website or a web-based application service, but it represents any traveler information distribution service. |
| Vehicle | Vehicle | This 'Vehicle' physical object is used to model core capabilities that are common to more than one type of Vehicle. It provides the vehicle-based general sensory, processing, storage, and communications functions that support efficient, safe, and convenient travel. Many of these capabilities (e.g., see the Vehicle Safety service packages) apply to all vehicle types including personal vehicles, commercial vehicles, emergency vehicles, transit vehicles, and maintenance vehicles. From this perspective, the Vehicle includes the common interfaces and functions that apply to all motorized vehicles. The radio(s) supporting V2V and V2I communications are a key component of the Vehicle. Both one-way and two-way communications options support a spectrum of information services from basic broadcast to advanced personalized information services. Advanced sensors, processors, enhanced driver interfaces, and actuators complement the driver information services so that, in addition to making informed mode and route selections, the driver travels these routes in a safer and more consistent manner. This physical object supports all six levels of driving automation as defined in SAE J3016. Initial collision avoidance functions provide 'vigilant co-pilot' driver warning capabilities. More advanced functions assume limited control of the vehicle to maintain lane position and safe headways. In the most advanced implementations, this Physical Object supports full automation of all aspects of the driving task, aided by communications with other vehicles in the vicinity and in coordination with supporting infrastructure subsystems. |
| Vehicle Characteristics | Vehicle | 'Vehicle Characteristics' represents the external view of individual vehicles of any class from cars and light trucks up to large commercial vehicles and down to micromobility vehicles (MMVs). It includes vehicle physical characteristics such as height, width, length, weight, and other properties (e.g., magnetic properties, number of axles) of individual vehicles that can be sensed and measured or classified. This physical object represents the physical properties of vehicles that can be sensed by vehicle-based or infrastructure-based sensors to support vehicle automation and traffic sensor systems. The analog properties provided by this terminator represent the sensor inputs that are used to detect and assess vehicle(s) within the sensor's range to support safe AV operation and/or responsive and safe traffic management. |
| Vulnerable Road Users | Personal | 'Vulnerable Road Users' represents any roadway user not in a motorized vehicle capable of operating at the posted speed for the roadway in question, and also any roadway user in a vehicle not designed to encase (and thus protect) its occupants. This includes pedestrians, cyclists, wheelchair users, two-wheeled scooter micromobility users, as well as powered scooters and motorcycles. Note that this terminator represents the physical properties of vulnerable road users and their conveyance that may be sensed to support safe vehicle automation and traffic management in mixed mode applications where a variety of road users share the right-of-way. See also 'Pedestrian' and 'MMV User' Physical Objects that represent the human interface to these vulnerable road users. |
Includes Functional Objects:
| Functional Object | Description | Physical Object |
|---|---|---|
| Roadway Basic Surveillance | 'Roadway Basic Surveillance' monitors traffic conditions using fixed equipment such as loop detectors and CCTV cameras. | ITS Roadway Equipment |
| Roadway Environmental Monitoring | 'Roadway Environmental Monitoring' measures environmental conditions and communicates the collected information back to a center where it can be monitored and analyzed or to other field devices to support communications to vehicles. A broad array of weather and road surface information may be collected. Weather conditions that may be measured include temperature, wind, humidity, precipitation, and visibility. Surface and sub-surface sensors can measure road surface temperature, moisture, icing, salinity, and other metrics. | ITS Roadway Equipment |
| Roadway Signal Control | 'Roadway Signal Control' includes the field elements that monitor and control signalized intersections. It includes the traffic signal controllers, detectors, conflict monitors, signal heads, and other ancillary equipment that supports traffic signal control. It also includes field masters, and equipment that supports communications with a central monitoring and/or control system, as applicable. The communications link supports upload and download of signal timings and other parameters and reporting of current intersection status. It represents the field equipment used in all levels of traffic signal control from basic actuated systems that operate on fixed timing plans through adaptive systems. It also supports all signalized intersection configurations, including those that accommodate pedestrians. In advanced, future implementations, environmental data may be monitored and used to support dilemma zone processing and other aspects of signal control that are sensitive to local environmental conditions. | ITS Roadway Equipment |
| RSE CACC Operations | 'RSE CACC Operations' provides infrastructure support for formation and dissolution of strings of CACC-equipped vehicles and provides operating parameters to the strings of vehicles including string length, recommended speeds, and gaps. | Connected Vehicle Roadside Equipment |
| RSE Environmental Monitoring | 'RSE Environmental Monitoring' collects environmental situation (probe) data from passing vehicles that are equipped with short range communications capability. The collected data includes current environmental conditions as measured by on-board sensors (e.g., ambient temperature and precipitation measures), current status of vehicle systems that can be used to infer environmental conditions (e.g., status of lights, wipers, ABS, and traction control systems), and emissions measures reported by the vehicle. The functional object collects the provided data, aggregates and filters the data based on provided configuration parameters, and sends the collected information back to a center for processing and distribution. This functional object may also process the collected data locally and issue short-term road weather advisories for the road segment using short range communications. | Connected Vehicle Roadside Equipment |
| RSE Intersection Management | 'RSE Intersection Management' uses short range communications to support connected vehicle applications that manage signalized intersections. It communicates with approaching vehicles and ITS infrastructure (e.g., the traffic signal controller) to enhance traffic signal operations. Coordination with the ITS infrastructure also supports conflict monitoring to ensure the RSE output and traffic signal control output are consistent and degrade in a fail safe manner. | Connected Vehicle Roadside Equipment |
| RSE Traffic Monitoring | 'RSE Traffic Monitoring' monitors the basic safety messages that are shared between connected vehicles and distills this data into traffic flow measures that can be used to manage the network in combination with or in lieu of traffic data collected by infrastructure-based sensors. As connected vehicle penetration rates increase, the measures provided by this application can expand beyond vehicle speeds that are directly reported by vehicles to include estimated volume, occupancy, and other measures. This object also supports incident detection by monitoring for changes in speed and vehicle control events that indicate a potential incident. | Connected Vehicle Roadside Equipment |
| TIC Traffic Control Dissemination | 'TIC Traffic Control Dissemination' disseminates intersection status, lane control information, and other traffic control related information that is real-time or near real-time in nature and relevant to vehicles in a relatively local area on the road network. It collects traffic control information from Traffic Management Center(s) and disseminates the relevant information to vehicles and other mobile devices. | Transportation Information Center |
| TMC Basic Surveillance | 'TMC Basic Surveillance' remotely monitors and controls traffic sensor systems and surveillance (e.g., CCTV) equipment, and collects, processes and stores the collected traffic data. Current traffic information and other real-time transportation information is also collected from other centers. The collected information is provided to traffic operations personnel and made available to other centers. | Traffic Management Center |
| TMC CACC Operations | 'TMC CACC Operations' provides the back office functionality that supports formation and dissolution of strings of CACC-equipped vehicles and provides operating parameters including string length, recommended speeds, and gaps that take into account regional traffic and environmental conditions. | Traffic Management Center |
| TMC Environmental Monitoring | 'TMC Environmental Monitoring' assimilates current and forecast road conditions and surface weather information using a combination of weather service provider information, information collected by other centers such as the Maintenance and Construction Management Center, data collected from environmental sensors deployed on and about the roadway, and information collected from connected vehicles. The collected environmental information is monitored and presented to the operator. This information can be used to issue general traveler advisories and support location specific warnings to drivers. | Traffic Management Center |
| TMC Signal Control | 'TMC Signal Control' provides the capability for traffic managers to monitor and manage the traffic flow at signalized intersections. This capability includes analyzing and reducing the collected data from traffic surveillance equipment and developing and implementing control plans for signalized intersections. Control plans may be developed and implemented that coordinate signals at many intersections under the domain of a single Traffic Management Center and are responsive to traffic conditions and adapt to support incidents, preemption and priority requests, pedestrian crossing calls, etc. | Traffic Management Center |
| Vehicle Basic Safety Communication | 'Vehicle Basic Safety Communication' exchanges current vehicle location and motion information with other vehicles in the vicinity, uses that information to calculate vehicle paths, and warns the driver when the potential for an impending collision is detected. If available, map data is used to filter and interpret the relative location and motion of vehicles in the vicinity. Information from on-board sensors (e.g., radars and image processing) are also used, if available, in combination with the V2V communications to detect non-equipped vehicles and corroborate connected vehicle data. Vehicle location and motion broadcasts are also received by the infrastructure and used by the infrastructure to support a wide range of roadside safety and mobility applications. This object represents a broad range of implementations ranging from basic Vehicle Awareness Devices that only broadcast vehicle location and motion and provide no driver warnings to advanced integrated safety systems that may, in addition to warning the driver, provide collision warning information to support automated control functions that can support control intervention. | Vehicle |
| Vehicle Control Automation | 'Vehicle Control Automation' provides lateral and/or longitudinal control of a vehicle to allow 'hands off' and/or 'feet off' driving, automating the steering, accelerator, and brake control functions. It builds on the sensors included in 'Vehicle Safety Monitoring' and 'Vehicle Control Warning' and uses the information about the area surrounding the vehicle to safely control the vehicle. It covers the range of incremental control capabilities from driver assistance systems that take over steering or acceleration/deceleration in limited scenarios with direct monitoring by the driver to full automation where all aspects of driving are automated under all roadway and environmental conditions. | Vehicle |
| Vehicle Control Warning | 'Vehicle Control Warning' monitors areas around the vehicle and provides warnings to a driver so the driver can take action to recover and maintain safe control of the vehicle. It includes lateral warning systems that warn of lane departures and obstacles or vehicles to the sides of the vehicle and longitudinal warning systems that monitor areas in the vehicle path and provide warnings when headways are insufficient or obstacles are detected in front of or behind the vehicle. It includes on-board sensors, including radars and imaging systems, and the driver information system that provides the visual, audible, and/or haptic warnings to the driver. | Vehicle |
| Vehicle Cooperative Cruise Control | 'Vehicle Cooperative Cruise Control' uses V2V communications to share speeds and coordinate maneuvers with adjacent vehicles in the same lane (a CACC 'string'), maintaining vehicle speed and a safe gap with the predecessor vehicle. It provides the capability for vehicles to cluster into strings of CACC-equipped vehicles with compatible performance characteristics and share speed, location, acceleration/deceleration, path predictions (e.g., intended acceleration/deceleration) with other vehicles in the string. These capabilities are provided by systems on board the vehicle that coordinate with other vehicles and control acceleration and braking. In advanced implementations, the capability to coordinate with the infrastructure to support more advanced clustering strategies and use infrastructure provided target speed and traffic control information to improve performance. | Vehicle |
| Vehicle Environmental Monitoring | 'Vehicle Environmental Monitoring' collects data from on-board sensors and systems related to environmental conditions and sends the collected data to the infrastructure as the vehicle travels. The collected data is a byproduct of vehicle safety and convenience systems and includes ambient air temperature and precipitation measures and status of the wipers, lights, ABS, and traction control systems. | Vehicle |
| Vehicle Intersection Warning | 'Vehicle Intersection Warning' uses V2V and V2I communications to monitor other connected vehicles at intersections and support the safe movement of the vehicle through the intersection. Driver warnings are provided and the application may also optionally take control of the vehicle to avoid collisions. The application will also notify the infrastructure and other vehicles if it detects an unsafe infringement on the intersection. | Vehicle |
Includes Information Flows:
| Information Flow | Description |
|---|---|
| cooperative adaptive cruise control parameters | Information, instructions, and control parameters for CACC operations including current system conditions and advisories, control parameters (e.g., target speeds, required vehicle profiles, recommended gaps, lane information) and cluster instructions that support CACC vehicle string creation and dissolution. |
| cooperative adaptive cruise control status | Data provided by a connected vehicle identifying it's current mode and operational status and information provided to support CACC string creation and dissolution. |
| cooperative cruise control application data | Control commands and operating parameters provided to RSEs that monitor and assist the formation, dissolution, and operation of strings of CACC-equipped vehicles. This flow includes recommended CACC operating parameters including maximum string size, target speeds, gaps, and restrictions. In implementations that support destination-based and optimum performance based formation of strings, this flow also supports regional coordination that assists in the assignment of vehicles to CACC strings. |
| cooperative cruise control application status | Current operational status of the infrastructure enhanced cooperative adaptive cruise control application. The flow includes the status of the RSEs, associated field equipment, and CACC-equipped vehicle strings using the facility. |
| driver input | Driver input to the vehicle on-board equipment including configuration data, settings and preferences, interactive requests, and control commands. |
| driver input information | Driver input received from the driver-vehicle interface equipment via the vehicle bus. It includes configuration data, settings and preferences, interactive requests, and control commands for the connected vehicle on-board equipment. |
| driver update information | Information provided to the driver-vehicle interface to inform the driver about current conditions, potential hazards, and the current status of vehicle on-board equipment. The flow includes the information to be presented to the driver and associated metadata that supports processing, prioritization, and presentation by the DVI as visual displays, audible information and warnings, and/or haptic feedback. |
| driver updates | Information provided to the driver including visual displays, audible information and warnings, and haptic feedback. The updates inform the driver about current conditions, potential hazards, and the current status of vehicle on-board equipment. |
| environmental conditions | Current road conditions (e.g., surface temperature, subsurface temperature, moisture, icing, treatment status) and surface weather conditions (e.g., air temperature, wind speed, precipitation, visibility) that are measured by environmental sensors. |
| environmental sensor control | Data used to configure and control environmental sensors. |
| environmental sensor data | Current road conditions (e.g., surface temperature, subsurface temperature, moisture, icing, treatment status) and surface weather conditions (e.g., air temperature, wind speed, precipitation, visibility) as measured and reported by fixed and/or mobile environmental sensors. Operational status of the sensors is also included. |
| environmental situation data | Aggregated and filtered vehicle environmental data collected from vehicle safety and convenience systems including measured air temperature, exterior light status, wiper status, sun sensor status, rain sensor status, traction control status, anti-lock brake status, and other collected vehicle system status and sensor information. This information flow represents the aggregated and filtered environmental data sets that are provided by the RSE to the back office center. Depending on the RSE configuration and implementation, the data set may also include environmental sensor station data collected by the RSE. |
| host vehicle status | Information provided to the ITS on-board equipment from other systems on the vehicle platform. This includes the current status of the powertrain, steering, and braking systems, and status of other safety and convenience systems. In implementations where GPS is not integrated into the Vehicle On-Board Equipment, the host vehicle is also the source for data describing the vehicle's location in three dimensions (latitude, longitude, elevation) and accurate time that can be used for time synchronization across the ITS environment. |
| intersection control status | Status data provided by the traffic signal controller including phase information, alarm status, and priority/preempt status. |
| intersection geometry | The physical geometry of an intersection covering the location and width of each approaching lane, egress lane, and valid paths between approaches and egresses. This flow also defines the location of stop lines, cross walks, specific traffic law restrictions for the intersection (e.g., turning movement restrictions), and other elements that support calculation of a safe and legal vehicle path through the intersection. |
| intersection management application info | Intersection and device configuration data, including intersection geometry, and warning parameters and thresholds. This flow also supports remote control of the application so the application can be taken offline, reset, or restarted. |
| intersection management application status | Infrastructure application status reported by the RSE. This includes current operational state and status of the RSE and a log of operations. |
| intersection status | Current signal phase and timing information for all lanes at a signalized intersection. This flow identifies active lanes and lanes that are being stopped and specifies the length of time that the current state will persist for each lane. It also identifies signal priority and preemption status and pedestrian crossing status information where applicable. |
| physical presence | Detection of an obstacle. Obstacle could include animals, incident management and construction elements such as cones, barrels and barriers, rocks in roadway, etc. |
| roadway characteristics | Detectable or measurable road characteristics such as friction coefficient and general surface conditions, road geometry and markings, etc. These characteristics are monitored or measured by ITS sensors and used to support advanced vehicle safety and control and road maintenance capabilities. |
| signal control status | Operational and status data of traffic signal control equipment including operating condition and current indications. |
| speed management information | Target speeds, speed advisories, and/or speed limit information provided to a vehicle. The information includes the current speed value(s), the route segment(s) and lane(s) where the speeds apply, and an indication of whether the speeds are suggested target speeds, posted advisory speeds, or enforceable speed limit values. This flow may also include information about the reason for reduced speeds and provide target lane information if lane changes are required. |
| traffic detector control | Information used to configure and control traffic detector systems such as inductive loop detectors and machine vision sensors. |
| traffic detector data | Raw and/or processed traffic detector data which allows derivation of traffic flow variables (e.g., speed, volume, and density measures) and associated information (e.g., congestion, potential incidents). This flow includes the traffic data and the operational status of the traffic detectors |
| traffic operator data | Presentation of traffic operations data to the operator including traffic conditions, current operating status of field equipment, maintenance activity status, incident status, video images, security alerts, emergency response plan updates and other information. This data keeps the operator appraised of current road network status, provides feedback to the operator as traffic control actions are implemented, provides transportation security inputs, and supports review of historical data and preparation for future traffic operations activities. |
| traffic operator input | User input from traffic operations personnel including requests for information, configuration changes, commands to adjust current traffic control strategies (e.g., adjust signal timing plans, change DMS messages), and other traffic operations data entry. |
| traffic situation data | Current, aggregate traffic data collected from connected vehicles that can be used to supplement or replace information collected by roadside traffic detectors. It includes raw and/or processed reported vehicle speeds, counts, and other derived measures. Raw and/or filtered vehicle control events may also be included to support incident detection. |
| vehicle characteristics | The physical or visible characteristics of individual vehicles that can be used to detect, classify, and monitor vehicles and imaged to uniquely identify vehicles. |
| vehicle cluster coordination | Coordination between CACC-equipped vehicles that enable formation and management of strings of adjacent equipped vehicles that coordinate speed management across the string. This flow includes coordination between CACC-equipped vehicles that enable adjacent vehicles in the same lane to identify each other and couple. Depending on the CACC implementation, this flow also supports identification of the lead vehicle in the string, operating performance parameters for the string, destination information so that drivers can join strings that share their destination, and coordination so that strings of vehicles are ordered based on the individual weight and performance profile of each participating vehicle. This flow also supports dissolution of CACC vehicle strings as vehicles depart from the string. |
| vehicle control | Control commands issued to vehicle actuators that control steering, throttle, and braking and other related commands that support safe transition between manual and automated vehicle control. This flow can also deploy restraints and other safety systems when a collision is unavoidable. |
| vehicle environmental data | Data from vehicle safety and convenience systems that can be used to estimate environmental and infrastructure conditions, including measured air temperature, exterior light status, wiper status, sun sensor status, rain sensor status, traction control status, anti-lock brake status, vertical acceleration and other collected vehicle system status and sensor information. The collected data is reported along with the location, heading, and time that the data was collected. Both current data and snapshots of recent events (e.g., traction control or anti-lock brake system activations) may be reported. |
| vehicle location and motion | Data describing the vehicle's location in three dimensions, heading, speed, acceleration, braking status, and size. |
| vehicle location and motion for surveillance | Data describing the vehicle's location in three dimensions, heading, speed, acceleration, braking status, and size. This flow represents monitoring of basic safety data ('vehicle location and motion') broadcast by passing connected vehicles for use in vehicle detection and traffic monitoring applications. |
| vehicle path prediction | The predicted future vehicle path of travel. This flow includes an indication of the future positions of the transmitting vehicle that can be used by receiving vehicles to support coordinated driving maneuvers and enhance in-lane and out-of-lane threat classification. |
| vehicle profile | Information about a vehicle such as vehicle make and model, fuel type, engine type, size and weight, vehicle performance and level of control automation, average emissions, average fuel consumption, passenger occupancy, or other data that can be used to classify vehicle eligibility for access to specific lanes, road segments, or regions or participation in cooperative vehicle control applications. |
| vulnerable road user presence | Detection of pedestrians, cyclists, and other vulnerable road users. This detection is based on physical characteristics of the user and their conveyance, which may be enhanced by design and materials that facilitate sensor-based detection and tracking of vulnerable road users. |
Goals and Objectives
Associated Planning Factors and Goals
| Planning Factor | Goal |
|---|---|
| A. Support the economic vitality of the metropolitan area, especially by enabling global competitiveness, productivity, and efficiency; | Improve freight network |
| B. Increase the safety of the transportation system for motorized and nonmotorized users; | Reduce fatalities and injuries |
| D. Increase the accessibility and mobility of people and for freight; | Reduce congestion |
| E. Protect and enhance the environment, promote energy conservation, improve the quality of life, and promote consistency between transportation improvements and State and local planned growth and economic development patterns; | Protect/Enhance the Environment |
| G. Promote efficient system management and operation; | Improve efficiency |
Associated Objective Categories 
Associated Objectives and Performance Measures
Needs and Requirements
| Need | Functional Object | Requirement | ||
|---|---|---|---|---|
| 01 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. | RSE Intersection Management | 09 | The field element shall collect current signal phase and timing data from the traffic signal controller. |
| Vehicle Basic Safety Communication | 02 | The vehicle shall provide its location with lane-level accuracy to on-board applications. | ||
| 05 | The vehicle shall calculate vehicle paths in order to determine if an impending collision is detected. | |||
| 06 | The vehicle shall exchange location and motion information with roadside equipment and nearby vehicles. | |||
| 07 | The vehicle shall receive warnings, informational road signs, traffic meters, and signals provided by infrastructure devices. | |||
| Vehicle Control Automation | 05 | The Vehicle shall provide its location with lane-level accuracy to on-board control automation applications. | ||
| 09 | The vehicle shall send appropriate control actions to the vehicle's steering actuators. | |||
| Vehicle Control Warning | 01 | The vehicle shall monitor the area to the sides of the vehicle to determine the proximity of other objects to the vehicle and if a warning is needed. | ||
| 02 | The vehicle shall evaluate the likelihood of a collision between two vehicles or a vehicle and a stationary object to warn the driver, based on the proximity of other objects to the vehicle, roadway characteristics, and the current speed and direction of the vehicle. | |||
| Vehicle Cooperative Cruise Control | 04 | The vehicle shall be capable of joining a platoon by determining the recommended platoon entry location and the timing for the vehicle to enter a platoon. | ||
| 20 | The Vehicle shall provide its location with lane-level accuracy to on-board cooperative cruise control applications. | |||
| Vehicle Intersection Warning | 03 | The vehicle shall receive intersection signal timing information in order for the vehicle to determine if it will safely cross the intersection given its current location and speed. | ||
| 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. | RSE CACC Operations | 04 | The roadside equipment shall disseminate current speed and gap policy recommendations to nearby equipped vehicles. |
| RSE Intersection Management | 01 | The field element shall communicate with passing vehicles to provide the current signal phase and timing information for all lanes and approaches at a signalized intersection. | ||
| 09 | The field element shall collect current signal phase and timing data from the traffic signal controller. | |||
| Vehicle Basic Safety Communication | 02 | The vehicle shall provide its location with lane-level accuracy to on-board applications. | ||
| 05 | The vehicle shall calculate vehicle paths in order to determine if an impending collision is detected. | |||
| 06 | The vehicle shall exchange location and motion information with roadside equipment and nearby vehicles. | |||
| 07 | The vehicle shall receive warnings, informational road signs, traffic meters, and signals provided by infrastructure devices. | |||
| 08 | The vehicle shall warn the driver of an Emergency Electronic Brake Light (EEBL) Event. | |||
| 09 | The vehicle shall determine when its host Vehicle is braking in an emergency fashion and broadcast an Emergency Electronic Brake Light (EEBL) notification. | |||
| 10 | The vehicle shall determine the status of host vehicle systems including vehicle speed, heading, yaw, wheelspin, ABS, traction control, and wiper status. | |||
| 11 | The vehicle shall determine if vehicle systems status indicates a potentially hazardous road condition. | |||
| Vehicle Control Automation | 01 | The vehicle shall monitor the area behind and in front of the vehicle to determine the proximity of other objects to the vehicle. | ||
| 02 | The vehicle shall monitor the area to the sides of the vehicle to determine the proximity of other objects to the vehicle to determine if a control adjustment is needed. | |||
| 03 | The vehicle shall evaluate the likelihood of a collision between two vehicles or a vehicle and a stationary object, based on the proximity of other objects to the vehicle and the current speed and direction of the vehicle. | |||
| 04 | The vehicle shall collect location and motion data from the vehicle platform. | |||
| 05 | The Vehicle shall provide its location with lane-level accuracy to on-board control automation applications. | |||
| 09 | The vehicle shall send appropriate control actions to the vehicle's steering actuators. | |||
| 17 | The vehicle shall send appropriate control actions to the vehicle's speed control systems (e.g., throttle, brakes). | |||
| Vehicle Control Warning | 01 | The vehicle shall monitor the area to the sides of the vehicle to determine the proximity of other objects to the vehicle and if a warning is needed. | ||
| 02 | The vehicle shall evaluate the likelihood of a collision between two vehicles or a vehicle and a stationary object to warn the driver, based on the proximity of other objects to the vehicle, roadway characteristics, and the current speed and direction of the vehicle. | |||
| Vehicle Cooperative Cruise Control | 05 | The vehicle shall coordinate acceleration and braking with adjacent vehicles in the same lane (a platoon), maintaining vehicle speed and a safe gap with the vehicle in front of it. | ||
| 08 | The vehicle shall send appropriate control actions to the vehicle's accelerator, braking and steering actuators when operating in an automated lane. | |||
| 09 | The vehicle shall provide a means for the driver to accept, reject, and modify a given speed and gap policy. | |||
| 10 | The vehicle shall exchange data with other vehicles in the platoon to share vehicle status information, roadway condition data, and initiate vehicle actuator controls to maintain safe following distances. | |||
| Vehicle Intersection Warning | 03 | The vehicle shall receive intersection signal timing information in order for the vehicle to determine if it will safely cross the intersection given its current location and speed. | ||
| 03 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to leave a platoon and return manual throttle control to the driver so they can change lanes safely. | RSE Intersection Management | 01 | The field element shall communicate with passing vehicles to provide the current signal phase and timing information for all lanes and approaches at a signalized intersection. |
| TMC Basic Surveillance | 01 | The center shall monitor, analyze, and store traffic sensor data (speed, volume, occupancy) collected from field elements under remote control of the center. | ||
| 07 | The center shall remotely control devices to detect traffic. | |||
| Vehicle Control Automation | 08 | The vehicle shall provide an interface through which a vehicle driver can initiate, monitor and terminate automatic control of the vehicle. | ||
| 10 | The vehicle shall present vehicle control information to the driver in audible or visual forms without impairing the driver's ability to control the vehicle in a safe manner. | |||
| Vehicle Cooperative Cruise Control | 11 | The vehicle shall determine recommended platoon exit location and timing for the vehicle to exit a platoon. | ||
| 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. | Roadway Environmental Monitoring | 01 | The field element shall include surface and sub-surface environmental sensors that measure road surface temperature, moisture, icing, salinity, and other measures. |
| 02 | The field element shall include environmental sensors that measure weather conditions including temperature, wind, humidity, precipitation, and visibility. | |||
| 04 | The field element's environmental sensors shall be remotely controlled by a traffic management center. | |||
| 07 | The field element shall provide environmental sensor equipment operational status to the controlling center or maintenance vehicle. | |||
| 10 | The field element shall provide weather and road surface condition data to centers. | |||
| 13 | The field element shall collect environmental data from connected vehicle roadside equipment. | |||
| 14 | The field element shall provide access to remotely collected environmental data (i.e., from connected vehicle sources) in the same manner is it provides access to locally collected environmental data (typically by providing it to various centers). | |||
| Roadway Signal Control | 09 | The field element shall report current intersection signal timing information to roadside equipment for transmission to connected vehicles. | ||
| RSE CACC Operations | 01 | The roadside equipment shall provide platoon-level gap and speed policy recommendations to connected vehicles in order to improve the safety and efficiency of platoon operations. | ||
| 03 | The roadside equipment shall process command and control information from the center to adjust platooning parameters. | |||
| RSE Environmental Monitoring | 01 | The field element shall communicate with passing vehicles to collect environmental monitoring data, including ambient air quality, emissions, temperature, precipitation, and other road weather information. | ||
| 02 | The field element shall aggregate and forward collected environmental probe information to the center. | |||
| 04 | The field element shall provide application status to the center for monitoring. | |||
| 05 | The field element shall aggregate and filter the collected environmental data based on configuration parameters received from the controlling center. | |||
| 07 | The field element shall provide environmental data to other field elements. | |||
| TIC Traffic Control Dissemination | 01 | The center shall provide intersection status, lane control information, and other real time traffic control related information to vehicles. | ||
| 02 | The center shall collect traffic control information from Traffic Management Center. | |||
| TMC CACC Operations | 01 | The center shall collect traffic and environmental data collected from field equipment and connected vehicles. | ||
| 02 | The center shall develop speed and gap recommendations for platoon vehicles based upon traffic and environmental data collected from field equipment and connected vehicles. | |||
| 03 | The center shall provide speed and gap recommendations to roadside equipment to support enhancement of traffic flow stability for connected vehicles operating in platoons. | |||
| TMC Environmental Monitoring | 05 | The traffic center shall receive aggregated and processed vehicle environmental data collected from vehicle safety and convenience systems through the connected vehicle roadside equipment. | ||
| Vehicle Cooperative Cruise Control | 06 | The vehicle shall communicate the current speed and gap policy to the driver interface system for display to the driver. | ||
| 07 | The vehicle shall receive automated highway system status, warnings and collision avoidance data (intersection congestion, approaching vehicles, potential collision hazards, etc.) from the roadway field equipment. | |||
| 17 | The vehicle shall have the ability to receive platoon-level gap and speed policy recommendations from infrastructure-based systems. | |||
| 18 | The vehicle shall send platoon information to the infrastructure in order to support infrastructure inputs to the platoon gap and speed strategies. | |||
| Vehicle Environmental Monitoring | 01 | The vehicle shall collect and process environmental sensor data, including air temperature and rain sensors. | ||
| 02 | The vehicle shall monitor the status of vehicle convenience and safety systems (wiper status, headlight status, traction control system status) that can be used to measure environmental conditions and record snapshots of significant events in these systems. | |||
| 04 | The vehicle shall transmit environmental probe data to field equipment located along the roadway using short range communications. | |||
| 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. | Roadway Basic Surveillance | 01 | The field element shall collect, process, digitize, and send traffic sensor data (speed, volume, and occupancy) to the center for further analysis and storage, under center control. |
| 04 | The field element shall return sensor and CCTV system operational status to the controlling center. | |||
| RSE CACC Operations | 02 | The roadside equipment shall collect connected vehicle information to allow the infrastructure to support platoon operations. | ||
| 05 | The roadside equipment shall disseminate performance parameters and destination information to nearby equipped vehicles involved in a platoon. | |||
| RSE Traffic Monitoring | 01 | The field element shall communicate with on-board equipment on passing vehicles to collect current vehicle position, speed, and heading and a record of previous events (e.g., starts and stops, link travel times) that can be used to determine current traffic conditions. | ||
| 02 | The field element shall aggregate and forward collected probe information to the center. | |||
| 03 | The field element shall aggregate and forward collected probe information to other field elements. | |||
| TMC Basic Surveillance | 02 | The center shall monitor, analyze, and distribute traffic images from CCTV systems under remote control of the center. | ||
| 05 | The center shall respond to control data from center personnel regarding sensor and surveillance data collection, analysis, storage, and distribution. | |||
| 06 | The center shall maintain a database of surveillance equipment and sensors and associated data (including the roadway on which they are located, the type of data collected, and the ownership of each). | |||
| TMC Signal Control | 15 | The center shall monitor, analyze, and store traffic sensor data (speed, volume, occupancy) collected from field elements at or near signalized intersections. | ||
| 16 | The center shall maintain a database of traffic sensors and associated data (including the roadway on which they are located, the type of data collected, and the ownership of each). | |||
| 17 | The center shall remotely control devices to detect traffic in the vicinity of traffic signals. | |||
| Vehicle Environmental Monitoring | 01 | The vehicle shall collect and process environmental sensor data, including air temperature and rain sensors. | ||
| 02 | The vehicle shall monitor the status of vehicle convenience and safety systems (wiper status, headlight status, traction control system status) that can be used to measure environmental conditions and record snapshots of significant events in these systems. | |||
| 04 | The vehicle shall transmit environmental probe data to field equipment located along the roadway using short range communications. | |||
| Vehicle Intersection Warning | 02 | Vehicle shall provide data describing the vehicle's location in three dimensions, heading, speed, acceleration, braking status, and size. | ||
Related Sources
| Document Name | Version | Publication Date |
|---|---|---|
| ITS User Services Document | 1/1/2005 | |
| Concept Development and Needs Identification for INFLO: Functional and Performance Requirements, and High-Level Data and Communication Needs | Final | 11/1/2012 |
| Concept Development and Needs Identification for Intelligent Network Flow Optimization (INFLO) ConOps | Draft v3.0 | 6/14/2012 |
Security
In order to participate in this service package, each physical object should meet or exceed the following security levels.
| Physical Object Security | ||||
|---|---|---|---|---|
| Physical Object | Confidentiality | Integrity | Availability | Security Class |
| Basic Vehicle | ||||
| Connected Vehicle Roadside Equipment | Moderate | High | Moderate | Class 3 |
| ITS Roadway Equipment | Moderate | High | Moderate | Class 3 |
| Other Vehicles | Low | High | Moderate | Class 3 |
| Potential Obstacles | ||||
| Roadway Environment | Not Applicable | Low | Low | Class 1 |
| Traffic Management Center | Moderate | High | Moderate | Class 3 |
| Transportation Information Center | Low | Moderate | Moderate | Class 1 |
| Vehicle | Moderate | High | Moderate | Class 3 |
| Vehicle Characteristics | ||||
| Vulnerable Road Users | ||||
In order to participate in this service package, each information flow triple should meet or exceed the following security levels.
| Information Flow Security | |||||
|---|---|---|---|---|---|
| Source | Destination | Information Flow | Confidentiality | Integrity | Availability |
| Basis | Basis | Basis | |||
| Basic Vehicle | Vehicle | driver input information | Moderate | High | High |
| Internal vehicle flow that if reverse engineered could enable third party vehicle control. Largely a competitive question, could be set LOW if manufacturer and operator are not concerned with this type of compromise. | Includes vehicle control commands, which must be timely and accurate to support safe vehicle operation. | Includes vehicle control commands, which must be timely and accurate to support safe vehicle operation. | |||
| Basic Vehicle | Vehicle | host vehicle status | Low | Moderate | High |
| Unlikely that this includes any information that could be used against the originator. | This can be MODERATE or HIGH, depending on the application: This is used later on to determine whether a vehicle is likely going to violate a red light or infringe a work zone. This needs to be correct in order for the application to work correctly. | Since this monitors the health and safety of the vehicle and that information is eventually reported to the driver, it should be available at all times as it directly affects vehicle and operator safety. | |||
| Connected Vehicle Roadside Equipment | ITS Roadway Equipment | environmental situation data | Low | Moderate | Moderate |
| Little to no impact if this data is observed | Some minimal guarantee of data integrity is necessary for all C-ITS flows. DISC: THEA believes this to be LOW: only limited adverse effect if environmental data from vehicle safety and convenience systems is bad/compromised; can cope with some bad data; DISC: WYO belives this to be MODERATE | Only limited adverse effect of info is not timely/readily available. DISC: WYO believes this to be MODERATE. Changed from THEA's LOW inferring severity of weather data in Wyoming | |||
| Connected Vehicle Roadside Equipment | ITS Roadway Equipment | traffic situation data | Moderate | Moderate | Moderate |
| Aggregated messages may have more privacy implications than individual ones, especially if an attacker can attack more than one RSE-to-TMC connection at once. | This information is used to help with incident detection. It should be verified to ensure that it is not incorrectly influencing this.THEA: only limited adverse effect if raw/processed connected vehicle data is bad/compromised; could be LOW for ISIG | This information is used as supplemental information. It should operate correctly if not every single message is received. THEA: only limited adverse effect if info is not timely/readily available, could be LOW for ISIG | |||
| Connected Vehicle Roadside Equipment | Traffic Management Center | cooperative cruise control application status | Moderate | High | Moderate |
| This information could be of interest to a malicious individual who is attempting to determine the best way to accomplish a crime. As such it would be best to not make it easily accessible. May be LOW in some cases. | If this is compromised, it could send unnecessary maintenance workers, or worse create a safety problem for CACC participants. Given that the impact of the latter scenario is very high and includes human safety, set to HIGH. | There will be fallback means for operating CACC without the RSE's input, however if an RSE were operational but its backhaul were compromised while it had out of date parameters, this scenario could be leveraged to disrupt CACC, thus MODERATE. | |||
| Connected Vehicle Roadside Equipment | Traffic Management Center | environmental situation data | Low | Moderate | Moderate |
| Little to no impact if this data is observed | Only limited adverse effect if environmental data from vehicle safety and convenience systems is bad/compromised; can cope with some bad data; DISC: WYO believes this to be MODERATE HIGH. Changed from THEA's LOW inferring severity of weather data in Wyoming | Only limited adverse effect of info is not timely/readily available. DISC: WYO believes this to be MODERATE. Changed from THEA's LOW inferring severity of weather data in Wyoming | |||
| Connected Vehicle Roadside Equipment | Traffic Management Center | intersection management application status | Moderate | Moderate | Low |
| This information could be of interest to a malicious individual who is attempting to determine the best way to accomplish a crime. As such it would be best to not make it easily accessible. May be LOW in some cases. | If this is compromised, it could send unnecessary maintenance workers, or worse report plausible data that is erroneous. From THEA: should be able to cope with some bad information on the status and record of alerts/warnings; aggregate info; however could cause appearance of excessive traffic violations or unnecessary maintenance caused if data is compromised (operational state, status, log); should not affect the application functionality | Incident status information should be presented in timely fashion as large scale mobility and safety issues are related. There are other mechanisms for reporting this information however, thus MODERATE. From THEA: Only limited adverse effect of info is not timely/readily available | |||
| Connected Vehicle Roadside Equipment | Traffic Management Center | traffic situation data | Moderate | Moderate | Low |
| Aggregated messages may have more privacy implications than individual ones, especially if an attacker can attack more than one RSE-to-TMC connection at once. | only limited adverse effect if raw/processed connected vehicle data is bad/compromised; DISC: NYC believes this to be MODERATE: As investigation might be triggered if RF quality is reported as low, this data should be trusted. RES: Agree wih NYC. | only limited adverse effect of info is not timely/readily available. NYC: This data is purely for statistical purposes so low availability does not harm the [RSE RF Monitoring] application. | |||
| Connected Vehicle Roadside Equipment | Vehicle | cooperative adaptive cruise control parameters | Low | High | Moderate |
| Intended for all vehicles participating in CACC scenario. | HIGH because lane change parameters could impact the safety of the vehicle network, particularly for vehicles that do not have CACC and are not aware of CACC behaviors, | There should be a back up or default mechanism in case this information cannot be exchanged. | |||
| Connected Vehicle Roadside Equipment | Vehicle | intersection geometry | Low | High | Moderate |
| Map data intended for general use by any C-ITS component than needs it. No information here includes PII or anything else that, if viewed by someone other than the participant, would lead to harm. | Map data is used for a host of application purposes. This widespread use means that any corruption in the data has a widespread and far reaching effect. | Occasional outages of this flow will delay updates and lead to a loss of accurate function of some applications. Depending on the application this could be HIGH. | |||
| Connected Vehicle Roadside Equipment | Vehicle | intersection status | Not Applicable | Moderate | Moderate |
| This data is intended for all vehicles in the immediate area of the sender. | If this is compromised, the Vehicle OBE will receive messages that are inconsistent with what the traffic signals are displaying. This could lead to confusion and reduce the ability of the application to provide value. | If this is down, the Vehicle OBE doesn't get the information it needs to stay in synch with the actual signal state, reducing or eliminating the value add from having this application. We assume that the Vehicle OBE will detect a lack of availability and choose not to send out-of-date information, so a failure of availability cannot have worse consequences than a failure of integrity which we have previously assessed at MEDIUM. | |||
| Connected Vehicle Roadside Equipment | Vehicle | vehicle cluster coordination | Low | High | Moderate |
| This data is intentionally transmitted to nearby roadside equipment and vehicles operating in a vehicle cluster. | Vehicle cluster coordination is critical to the performance of a group of vehicles in a vehicle cluster scenario. Incorrect data here is unlikely to trigger a severe accident scenario, but could have negative consequences on the performance of the cluster. Considered HIGH to be safe. | Vehicle clustering scenarios may function without this flow, but will probably not be as efficient without benefit of roadside inputs. | |||
| Driver | Vehicle | driver input | Moderate | High | High |
| Data included in this flow may include origin and destination information, which should be protected from other's viewing as it may compromise the driver's privacy. | Commands from from the driver to the vehicle must be correct or the vehicle may behave in an unpredictable and possibly unsafe manner | Commands must always be able to be given or the driver has no control. | |||
| ITS Roadway Equipment | Connected Vehicle Roadside Equipment | intersection control status | Low | High | Moderate |
| This data is intentionally transmitted to everyone via a broadcast. It can also be determined via other visual indicators. | If this is compromised, the Roadway Equipment and Roadside Equipment will be sending messages that are inconsistent with each other, leading to confusion and possible accidents. | If this is down, the RSE doesn't get the information it needs to stay in synch with the actual signal state, reducing or eliminating the value add from having this application. The RSE must detect a lack of availability and choose not to send out-of-date information, so a failure of availability could be interpreted as having the same value as Integrity. However, this data is semi-predictable and there are other indicators (such as the lights themselves) of the intersection status. From NYC, who believe this should be HIGH for some applications: If this is down, the RSE doesn't get the information it needs to stay in synch with the actual signal state, reducing or eliminating the value add from having this application. The RSE must detect a lack of availability and choose not to send out-of-date information, so a failure of availability cannot have worse consequences than a failure of integrity which we have previously assessed at HIGH. |
|||
| ITS Roadway Equipment | Traffic Management Center | environmental sensor data | Low | Moderate | Moderate |
| Little to no impact if this data is observed | info should be correct to determine safe speeds etc.; DISC: WYO believes this to be HIGH | Updates are desireable but slightly outdated information will not be catastrophic. | |||
| ITS Roadway Equipment | Traffic Management Center | signal control status | Low | High | Moderate |
| The current conditions of an ITS RE are completely observable, by design. | This influences the TMC response to a right-of-way request. It should be as accurate as the right-of-way request themselves. For some applications (ISIG) this need only be moderate. Per THEA: info needs to be accurate and should not be tampered to enable effective monitoring and control by the TMC. DISC: THEA believes this to be MODERATE: "info needs to be accurate and should not be tampered to enable effective monitoring and control by the TMC; should be as accurate as the right of way request". NYC:TMC doesn't play an active role in this application, i.e. even if the information contained in this flow were incorrect, it is unlikely to affect the outcome of this application one way or the other. On some applications NYC has this MODERATE though. RES: This value can obviously change a lot depending on the application context. | The TMC will need the current status of the ITS RE in order to make an educated decision. If it is unavailable, the system is unable to operate. However, a few missed messages will not have a catastrophic impact. From NYC: TMC doesn't play an active role in this application, i.e. even if it is unavailable, it is unlikely to affect the outcome of this application one way or the other. RES: This value can change a lot depending on the application context. | |||
| ITS Roadway Equipment | Traffic Management Center | traffic detector data | Low | Moderate | Moderate |
| No impact if someone sees the data | Some minimal guarantee of data integrity is necessary for all C-ITS flows. THEA believes this to be LOW.only limited adverse effect if raw/processed traffic detector data is bad/compromised; DISC: WYO believes this to be HIGH | Only limited adverse effect of info is not timely/readily available, however without this information it will be difficult to perform traffic management activities, thus MODERATE. If not used for management, may be LOW. | |||
| Other Vehicles | Vehicle | vehicle cluster coordination | Low | High | Moderate |
| This data is intentionally transmitted to other vehicles operating in a vehicle cluster. | Vehicle cluster coordination is critical to the performance of a group of vehicles in a vehicle cluster scenario. Incorrect data here is unlikely to trigger a severe accident scenario, but could have negative consequences on the performance of the cluster. Considered HIGH to be safe. | Vehicle clustering scenarios cannot function without this flow. Worst case is non-initiation of the cluster however, which while significant to mobility does not have a direct severe consequence. | |||
| Other Vehicles | Vehicle | vehicle environmental data | Low | Moderate | Moderate |
| Little abusive potential for capturing the information in this flow as designed. Could be moderate if this contains PII related information, but considered for now to not include any PII; DISC: WYO believes Vehicle to Center versions of this flow to be MODERATE as center penetrations could more easily garner aggregate user data that might be used for mischief. | This could be used for safety applications, and in areas of severe weather a corrupted field could have significant consequences; however, any vehicle will use other inputs before triggering automatic safety facilities, so MODERATE should be sufficient. DISC: WYO believes this to be HIGH. | This data is required for the system to operate properly. If this data is not available, the system cannot give accurate warning information. | |||
| Other Vehicles | Vehicle | vehicle location and motion | Not Applicable | High | Moderate |
| This data is intentionally transmitted to everyone via a broadcast. Much of its information content can also be determined via other visual indicators | BSM info needs to be accurate and should not be tampered with | BSM must be broadcast regularly to make data available for other vehicle OBEs, but availability cannot be guaranteed over a wireless medium | |||
| Other Vehicles | Vehicle | vehicle path prediction | Not Applicable | High | Moderate |
| This data is intentionally transmitted to other vehicles operating in a cluster. | Vehicle path data is critical to the performance of a group of vehicles in a vehicle cluster scenario. Incorrect data here could trigger a severe accident scenario. | Some vehicle cluster scenarios cannot function without this flow. Worst case is that some vehicles will drop from the platoon however, which while significant to mobility does not have a direct severe consequence. | |||
| Other Vehicles | Vehicle | vehicle profile | Low | Moderate | Moderate |
| This data is intentionally transmitted to other vehicles operating in a vehicle cluster. | Vehicle profile data is critical to the performance of a group of vehicles in a vehicle cluster scenario. Incorrect data here could trigger a severe accident scenario. | Vehicle clustering scenarios cannot function without this flow. Worst case is non-initiation of the platoon however, which while significant to mobility does not have a direct severe consequence. | |||
| Roadway Environment | ITS Roadway Equipment | environmental conditions | Not Applicable | Low | Low |
| Sensor-based information flows by definition have no confidentiality concerns. | While typically security concerns related to sensing ignored, if considered this would be LOW, as the obfuscation or failure of any given environmental sensor is likely to be overcome by the mass of data necessary to draw environmental concluisions. | While typically security concerns related to sensing ignored, if considered this would be LOW, as the obfuscation or failure of any given environmental sensor is likely to be overcome by the mass of data necessary to draw environmental concluisions. | |||
| Roadway Environment | Vehicle | environmental conditions | Not Applicable | Low | Low |
| Sensor-based information flows by definition have no confidentiality concerns. | While typically security concerns related to sensing ignored, if considered this would be LOW, as the obfuscation or failure of any given environmental sensor is likely to be overcome by the mass of data necessary to draw environmental concluisions. | While typically security concerns related to sensing ignored, if considered this would be LOW, as the obfuscation or failure of any given environmental sensor is likely to be overcome by the mass of data necessary to draw environmental concluisions. | |||
| Roadway Environment | Vehicle | roadway characteristics | Not Applicable | Low | Low |
| Sensor-based information flows by definition have no confidentiality concerns. | While typically security concerns related to sensing ignored, if considered this would be LOW, as the obfuscation or failure of any given environmental sensor is likely to be overcome by the mass of data necessary to draw environmental concluisions. | While typically security concerns related to sensing ignored, if considered this would be LOW, as the obfuscation or failure of any given environmental sensor is likely to be overcome by the mass of data necessary to draw environmental concluisions. | |||
| Traffic Management Center | Connected Vehicle Roadside Equipment | cooperative cruise control application data | Moderate | High | Moderate |
| Control flows, even for seemingly innocent devices, should be kept confidential to minimize attack vectors. While an individual installation may not be particularly impacted by a cyberattack of its sensor network, another installation might be severely impacted, and different installations are likely to use similar methods, so compromising one leads to compromising all. | Control flows, even for seemingly innocent devices, should have MODERATE integrity at minimum, just to guarantee that intended control messages are received. Incorrect, corrupted, intercepted and modified control messages can or will result in target field devices not behaving according to operator intent. The severity of this depends on the type of device, which is why some devices are set MODERATE and some HIGH. | Control flow availability is related to the criticality of being able to remotely control the device. For most devices, this is MODERATE. For purely passive devices with no incident relationship, this will be LOW. All devices should have default modes that enable them to operate without backhaul connectivity, so no device warrants a HIGH. | |||
| Traffic Management Center | Connected Vehicle Roadside Equipment | intersection management application info | Moderate | High | Low |
| proprietary configuration data with warning parameters and thresholds | should be accurate and not be tampered with; could enable outside control of application | should be timely and readily available or may not be able to restart/reset; however, should be able to operate on a default configuration and/or stop sending messages | |||
| Traffic Management Center | ITS Roadway Equipment | environmental sensor control | Moderate | Moderate | Low |
| Control flows, even for seemingly innocent devices, should be kept confidential to minimize attack vectors. While an individual installation may not be particularly impacted by a cyberattack of its sensor network, another installation might be severely impacted, and different installations are likely to use similar methods, so compromising one leads to compromising all. DISC: THEA, WYO believe this to be LOW: encrypted, authenticated, proprietary; but should not cause severe damage if seen | Should be accurate and not be tampered with; could enable outside control of traffic sensors but should not cause severe harm, but could cause issues with environmental sensor data received and be detrimental to operations; DISC: WYO believes this may be HIGH for some applications | Control flow availability is related to the criticality of being able to remotely control the device. For most devices, this is MODERATE. For purely passive devices with no incident relationship, this will be LOW. All devices should have default modes that enable them to operate without backhaul connectivity, so no device warrants a HIGH. From THEAwant updates but delayed information will not be severe; should be able to operate from a previous/default control/config; DISC: WYO believes this to be MODERATE | |||
| Traffic Management Center | ITS Roadway Equipment | traffic detector control | Moderate | Moderate | Low |
| Control flows, even for seemingly innocent devices, should be kept confidential to minimize attack vectors. While an individual installation may not be particularly impacted by a cyberattack of its sensor network, another installation might be severely impacted, and different installations are likely to use similar methods, so compromising one leads to compromising all. DISC: THEA, WYO believe this to be LOW: encrypted, authenticated, proprietary; but should not cause severe damage if seen | Control flows, even for seemingly innocent devices, should have MODERATE integrity at minimum, just to guarantee that intended control messages are received. Incorrect, corrupted, intercepted and modified control messages can or will result in target field devices not behaving according to operator intent. The severity of this depends on the type of device, which is why some devices are set MODERATE and some HIGH.. From THEA: should be accurate and not be tampered with; could enable outside control of traffic sensors but should not cause severe harm, but could cause issues with traffic sensor data received and be detrimental to operations | Control flow availability is related to the criticality of being able to remotely control the device. For most devices, this is MODERATE. For purely passive devices with no incident relationship, this will be LOW. All devices should have default modes that enable them to operate without backhaul connectivity, so no device warrants a HIGH.. From THEA: want updates but delayed information will not be severe; should be able to operate from a previous/default control/config. DISC: WYO believes this to be MODERATE | |||
| Traffic Management Center | Traffic Operations Personnel | traffic operator data | Moderate | Moderate | Moderate |
| Backoffice operations flows should have minimal protection from casual viewing, as otherwise imposters could gain illicit control or information that should not be generally available. | Information presented to backoffice system operators must be consistent or the operator may perform actions that are not appropriate to the real situation. | The backoffice system operator should have access to system operation. If this interface is down then control is effectively lost, as without feedback from the system the operator has no way of knowing what is the correct action to take. | |||
| Traffic Management Center | Transportation Information Center | intersection status | Not Applicable | Moderate | Moderate |
| This data is distributed using a variety of mechanisms, some of which are localized broadcast; it is desireable that all potential users get this information. | If this flow is not accurate or delivered in a timely fashion then a large variety of mobility and safety services that depend on it will not work properly. | If this flow is not accurate or delivered in a timely fashion then a large variety of mobility and safety services that depend on it will not work properly. | |||
| Traffic Management Center | Transportation Information Center | speed management information | Low | Moderate | Moderate |
| This information is directly observable. | Wrong information would either falsely warn or advise the driver. DISC: WYO believes this to be HIGH. | These notifications are helpful to a driver, if the driver does not receive this notification immediately, there should still be other visual cues | |||
| Traffic Operations Personnel | Traffic Management Center | traffic operator input | Moderate | High | High |
| Backoffice operations flows should have minimal protection from casual viewing, as otherwise imposters could gain illicit control or information that should not be generally available. | Backoffice operations flows should generally be correct and available as these are the primary interface between operators and system. | Backoffice operations flows should generally be correct and available as these are the primary interface between operators and system. | |||
| Transportation Information Center | Vehicle | intersection status | Not Applicable | Moderate | Moderate |
| This data is distributed using a variety of mechanisms, some of which are localized broadcast; it is desireable that all potential users get this information. | If this flow is not accurate or delivered in a timely fashion then a large variety of mobility and safety services that depend on it will not work properly. | If this flow is not accurate or delivered in a timely fashion then a large variety of mobility and safety services that depend on it will not work properly. | |||
| Transportation Information Center | Vehicle | speed management information | Low | Moderate | Moderate |
| This information is directly observable. | Wrong information would either falsely warn or advise the driver. DISC: WYO believes this to be HIGH. | These notifications are helpful to a driver, if the driver does not receive this notification immediately, there should still be other visual cues | |||
| Vehicle | Basic Vehicle | driver update information | Low | Moderate | Moderate |
| This information is all presented to the vehicle operator. Encrypting this information may make it harder to reverse engineer vehicle systems, and may defeat criminal tracking tools when the vehicle has already been compromised. Unless those scenarios are of concern to the operator or manufacturer, this can safely be set LOW. | Any information presented to the operator of a vehicle should be both accurate and timely. By definition this includes safety information, but given that the driver has other means of learning about most threats, it seems difficult to justify HIGH. If HIGH is warranted, it should apply to both availability and integrity. | Any information presented to the operator of a vehicle should be both accurate and timely. By definition this includes safety information, but given that the driver has other means of learning about most threats, it seems difficult to justify HIGH. If HIGH is warranted, it should apply to both availability and integrity. | |||
| Vehicle | Basic Vehicle | vehicle control | Moderate | High | High |
| Internal vehicle flow that if reverse engineered could enable third party vehicle control. Largely a competitive question, could be set LOW if manufacturer and operator are not concerned with this type of compromise. | Includes vehicle control commands, which must be timely and accurate to support safe vehicle operation. | Includes vehicle control commands, which must be timely and accurate to support safe vehicle operation. | |||
| Vehicle | Connected Vehicle Roadside Equipment | cooperative adaptive cruise control status | Moderate | Moderate | Moderate |
| CACC vehicle operating conditions could imply PII, and as they are internal measures should be provided only to intended recipients. | CACC operating conditions, if reported incorrectly, could result in warnings or operations responses that are inappropriate. | Other mechanisms for determining this information are unlikely, but given compettive concerns, applications will have to be designed to work without this data. | |||
| Vehicle | Connected Vehicle Roadside Equipment | vehicle cluster coordination | Low | High | Moderate |
| This data is intentionally transmitted to nearby roadside equipment and vehicles operating in a vehicle cluster. | Vehicle cluster coordination is critical to the performance of a group of vehicles in a vehicle cluster scenario. Incorrect data here is unlikely to trigger a severe accident scenario, but could have negative consequences on the performance of the cluster. Considered HIGH to be safe. | Vehicle clustering scenarios may function without this flow, but will probably not be as efficient without benefit of roadside inputs. | |||
| Vehicle | Connected Vehicle Roadside Equipment | vehicle environmental data | Low | Moderate | Low |
| Little abusive potential for capturing the information in this flow as designed. Could be moderate if this contains PII related information, but considered for now to not include any PII; DISC: WYO believes Vehicle to Center versions of this flow to be MODERATE as center penetrations could more easily garner aggregate user data that might be used for mischief. | Some minimal guarantee of data integrity is necessary for all C-ITS flows. DISC THEA believes this to be LOW: Data should be accurate and not tampered with but should be able to cope with some bad data in traffic/environmental condition monitoring; aggregate data; can also receive data from ITS RE; DISC: WYO believes this to be MODERATE | data should be timely and readily available, but limited adverse effect; aggregate data; can also receive data from ITS RE; DISC: WYO believes this to be MODERATE | |||
| Vehicle | Connected Vehicle Roadside Equipment | vehicle location and motion for surveillance | Not Applicable | Moderate | Moderate |
| This is directly observable data; DISC: WYO believes this to be MODERATE | Incorrect information here could lead to the system not functioning properly. If they are unable to properly detect all vehicles crossing the border, it would lead to confusion. There are other factors, such as visual indicators, of vehicles crossing the border, which can be used to help mitigate contradicting information. DISC: THEA believes this should be HIGH: "BSM info needs to be accurate and should not be tampered with" WYO believes this to be HIGH | This information must be available in a timely manner for the system to act upon it. The system can operate correctly if some messages are missed, but overall a majority of them should be received.; WYO believes this to be LOW | |||
| Vehicle | Connected Vehicle Roadside Equipment | vehicle profile | Low | Moderate | Moderate |
| Includes no PII and probably includes information that could be observed, so no need for obfuscation. | As this information will be used to determine the vehicle's ability to access services or be charged usage fees, it must be correct and not easily forgeable. | This flow enables various services; if the flow is not available the vehicle may not be able to use those services, and also may be charged incorrectly. | |||
| Vehicle | Driver | driver updates | Not Applicable | Moderate | Moderate |
| This data is informing the driver about the safety of a nearby area. It should not contain anything sensitive, and does not matter if another person can observe it. | This is the information that is presented to the driver. If they receive incorrect information, they may act in an unsafe manner. However, there are other indicators that would alert them to any hazards, such as an oncoming vehicle or crossing safety lights. | If this information is not made available to the driver, then the system has not operated correctly. | |||
| Vehicle | Other Vehicles | vehicle cluster coordination | Low | High | Moderate |
| This data is intentionally transmitted to nearby roadside equipment and vehicles operating in a vehicle cluster. | Vehicle cluster coordination is critical to the performance of a group of vehicles in a vehicle cluster scenario. Incorrect data here is unlikely to trigger a severe accident scenario, but could have negative consequences on the performance of the cluster. Considered HIGH to be safe. | Vehicle clustering scenarios cannot function without this flow. Worst case is non-initiation of the cluster however, which while significant to mobility does not have a direct severe consequence. | |||
| Vehicle | Other Vehicles | vehicle environmental data | Low | Moderate | Moderate |
| Little abusive potential for capturing the information in this flow as designed. Could be moderate if this contains PII related information, but considered for now to not include any PII; DISC: WYO believes Vehicle to Center versions of this flow to be MODERATE as center penetrations could more easily garner aggregate user data that might be used for mischief. | This could be used for safety applications, and in areas of severe weather a corrupted field could have significant consequences; however, any vehicle will use other inputs before triggering automatic safety facilities, so MODERATE should be sufficient. DISC: WYO believes this to be HIGH. | This data is required for the system to operate properly. If this data is not available, the system cannot give accurate warning information. | |||
| Vehicle | Other Vehicles | vehicle location and motion | Not Applicable | High | Moderate |
| This data is intentionally transmitted to everyone via a broadcast. Much of its information content can also be determined via other visual indicators | BSM info needs to be accurate and should not be tampered with | BSM must be broadcast regularly to make data available for other vehicle OBEs, but availability cannot be guaranteed over a wireless medium | |||
| Vehicle | Other Vehicles | vehicle path prediction | Not Applicable | High | Moderate |
| This data is intentionally transmitted to other vehicles operating in a cluster. | Vehicle path data is critical to the performance of a group of vehicles in a vehicle cluster scenario. Incorrect data here could trigger a severe accident scenario. | Some vehicle cluster scenarios cannot function without this flow. Worst case is that some vehicles will drop from the platoon however, which while significant to mobility does not have a direct severe consequence. | |||
| Vehicle | Other Vehicles | vehicle profile | Low | High | Moderate |
| This data is intentionally transmitted to other vehicles operating in a vehicle cluster. | Vehicle profile data is critical to the performance of a group of vehicles in a vehicle cluster scenario. Incorrect data here could trigger a severe accident scenario. | Vehicle clustering scenarios cannot function without this flow. Worst case is non-initiation of the platoon however, which while significant to mobility does not have a direct severe consequence. | |||
Standards
The following table lists the standards associated with physical objects in this service package. For standards related to interfaces, see the specific information flow triple pages.
| Name | Title | Physical Object |
|---|---|---|
| CTI 4001 RSU | Dedicated Short-Range Communications Roadside Unit Specifications (FHWA-JPO-17-589) | Connected Vehicle Roadside Equipment |
| ITE ATC | Advanced Transportation Controller | ITS Roadway Equipment |
| ITE ATC API | Application Programming Interface Standard for the Advanced Transportation Controller | ITS Roadway Equipment |
| ITE ATC ITS Cabinet | Intelligent Transportation System Standard Specification for Roadside Cabinets | ITS Roadway Equipment |
| ITE ATC Model 2070 | Model 2070 Controller Standard | ITS Roadway Equipment |
| NEMA TS 8 Cyber and Physical Security | Cyber and Physical Security for Intelligent Transportation Systems | ITS Roadway Equipment |
| Traffic Management Center | ||
| NEMA TS2 Traffic Controller Assemblies | Traffic Controller Assemblies with NTCIP Requirements | ITS Roadway Equipment |
System Requirements
| System Requirement | Need | ||
|---|---|---|---|
| 001 | The system shall provide intersection status, lane control information, and other real time traffic control related information to vehicles. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 002 | The system shall collect traffic control information from Traffic Management Center. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 003 | The system shall monitor, analyze, and store traffic sensor data (speed, volume, occupancy) collected from field elements under remote control of the center. | 03 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to leave a platoon and return manual throttle control to the driver so they can change lanes safely. |
| 004 | The system shall monitor, analyze, and distribute traffic images from CCTV systems under remote control of the center. | 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. |
| 005 | The system shall respond to control data from center personnel regarding sensor and surveillance data collection, analysis, storage, and distribution. | 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. |
| 006 | The system shall maintain a database of surveillance equipment and sensors and associated data (including the roadway on which they are located, the type of data collected, and the ownership of each). | 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. |
| 007 | The system shall remotely control devices to detect traffic. | 03 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to leave a platoon and return manual throttle control to the driver so they can change lanes safely. |
| 008 | The system shall collect traffic and environmental data collected from field equipment and connected vehicles. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 009 | The system shall develop speed and gap recommendations for platoon vehicles based upon traffic and environmental data collected from field equipment and connected vehicles. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 010 | The system shall provide speed and gap recommendations to roadside equipment to support enhancement of traffic flow stability for connected vehicles operating in platoons. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 011 | The system shall receive aggregated and processed vehicle environmental data collected from vehicle safety and convenience systems through the connected vehicle roadside equipment. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 012 | The system shall monitor, analyze, and store traffic sensor data (speed, volume, occupancy) collected from field elements at or near signalized intersections. | 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. |
| 013 | The system shall maintain a database of traffic sensors and associated data (including the roadway on which they are located, the type of data collected, and the ownership of each). | 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. |
| 014 | The system shall remotely control devices to detect traffic in the vicinity of traffic signals. | 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. |
| 015 | The system shall collect, process, digitize, and send traffic sensor data (speed, volume, and occupancy) to the center for further analysis and storage, under center control. | 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. |
| 016 | The system shall return sensor and CCTV system operational status to the controlling center. | 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. |
| 017 | The system shall include surface and sub-surface environmental sensors that measure road surface temperature, moisture, icing, salinity, and other measures. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 018 | The system shall include environmental sensors that measure weather conditions including temperature, wind, humidity, precipitation, and visibility. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 019 | The system shall provide environmental sensor equipment operational status to the controlling center or maintenance vehicle. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 020 | The system shall provide weather and road surface condition data to centers. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 021 | The system shall collect environmental data from connected vehicle roadside equipment. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 022 | The system shall provide access to remotely collected environmental data (i.e., from connected vehicle sources) in the same manner is it provides access to locally collected environmental data (typically by providing it to various centers). | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 023 | The system shall report current intersection signal timing information to roadside equipment for transmission to connected vehicles. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 024 | The system shall provide platoon-level gap and speed policy recommendations to connected vehicles in order to improve the safety and efficiency of platoon operations. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 025 | The system shall collect connected vehicle information to allow the infrastructure to support platoon operations. | 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. |
| 026 | The system shall process command and control information from the center to adjust platooning parameters. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 027 | The system shall disseminate current speed and gap policy recommendations to nearby equipped vehicles. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. |
| 028 | The system shall disseminate performance parameters and destination information to nearby equipped vehicles involved in a platoon. | 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. |
| 029 | The system shall communicate with passing vehicles to collect environmental monitoring data, including ambient air quality, emissions, temperature, precipitation, and other road weather information. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 030 | The system shall aggregate and forward collected environmental probe information to the center. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 031 | The system shall provide application status to the center for monitoring. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 032 | The system shall aggregate and filter the collected environmental data based on configuration parameters received from the controlling center. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 033 | The system shall provide environmental data to other field elements. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 034 | The system shall communicate with passing vehicles to provide the current signal phase and timing information for all lanes and approaches at a signalized intersection. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. |
| 03 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to leave a platoon and return manual throttle control to the driver so they can change lanes safely. | ||
| 035 | The system shall collect current signal phase and timing data from the traffic signal controller. | 01 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. | ||
| 036 | The system shall communicate with on-board equipment on passing vehicles to collect current vehicle position, speed, and heading and a record of previous events (e.g., starts and stops, link travel times) that can be used to determine current traffic cond | 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. |
| 037 | The system shall aggregate and forward collected probe information to the center. | 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. |
| 038 | The system shall aggregate and forward collected probe information to other field elements. | 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. |
| 039 | The system shall provide its location with lane-level accuracy to on-board applications. | 01 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. | ||
| 040 | The system shall calculate vehicle paths in order to determine if an impending collision is detected. | 01 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. | ||
| 041 | The system shall exchange location and motion information with roadside equipment and nearby vehicles. | 01 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. | ||
| 042 | The system shall receive warnings, informational road signs, traffic meters, and signals provided by infrastructure devices. | 01 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. | ||
| 043 | The system shall warn the driver of an Emergency Electronic Brake Light (EEBL) Event. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. |
| 044 | The system shall determine when its host Vehicle is braking in an emergency fashion and broadcast an Emergency Electronic Brake Light (EEBL) notification. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. |
| 045 | The system shall determine the status of host vehicle systems including vehicle speed, heading, yaw, wheelspin, ABS, traction control, and wiper status. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. |
| 046 | The system shall determine if vehicle systems status indicates a potentially hazardous road condition. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. |
| 047 | The system shall monitor the area behind and in front of the vehicle to determine the proximity of other objects to the vehicle. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. |
| 048 | The system shall monitor the area to the sides of the vehicle to determine the proximity of other objects to the vehicle to determine if a control adjustment is needed. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. |
| 049 | The system shall evaluate the likelihood of a collision between two vehicles or a vehicle and a stationary object, based on the proximity of other objects to the vehicle and the current speed and direction of the vehicle. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. |
| 050 | The system shall provide its location with lane-level accuracy to on-board control automation applications. | 01 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. | ||
| 051 | The system shall provide an interface through which a vehicle driver can initiate, monitor and terminate automatic control of the vehicle. | 03 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to leave a platoon and return manual throttle control to the driver so they can change lanes safely. |
| 052 | The system shall send appropriate control actions to the vehicle's steering actuators. | 01 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. | ||
| 053 | The system shall present vehicle control information to the driver in audible or visual forms without impairing the driver's ability to control the vehicle in a safe manner. | 03 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to leave a platoon and return manual throttle control to the driver so they can change lanes safely. |
| 054 | The system shall send appropriate control actions to the vehicle's speed control systems (e.g., throttle, brakes). | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. |
| 055 | The system shall monitor the area to the sides of the vehicle to determine the proximity of other objects to the vehicle and if a warning is needed. | 01 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. | ||
| 056 | The system shall evaluate the likelihood of a collision between two vehicles or a vehicle and a stationary object to warn the driver, based on the proximity of other objects to the vehicle, roadway characteristics, and the current speed and direction of t | 01 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. | ||
| 057 | The system shall join a platoon by determining the recommended platoon entry location and the timing for the vehicle to enter a platoon. | 01 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 058 | The system shall coordinate acceleration and braking with adjacent vehicles in the same lane (a platoon), maintaining vehicle speed and a safe gap with the vehicle in front of it. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. |
| 059 | The system shall communicate the current speed and gap policy to the driver interface system for display to the driver. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 060 | The system shall receive automated highway system status, warnings and collision avoidance data (intersection congestion, approaching vehicles, potential collision hazards, etc.) from the roadway field equipment. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 061 | The system shall send appropriate control actions to the vehicle's accelerator, braking and steering actuators when operating in an automated lane. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. |
| 062 | The system shall provide a means for the driver to accept, reject, and modify a given speed and gap policy. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. |
| 063 | The system shall exchange data with other vehicles in the platoon to share vehicle status information, roadway condition data, and initiate vehicle actuator controls to maintain safe following distances. | 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. |
| 064 | The system shall determine recommended platoon exit location and timing for the vehicle to exit a platoon. | 03 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to leave a platoon and return manual throttle control to the driver so they can change lanes safely. |
| 065 | The system shall have the ability to receive platoon-level gap and speed policy recommendations from infrastructure-based systems. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 066 | The system shall send platoon information to the infrastructure in order to support infrastructure inputs to the platoon gap and speed strategies. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 067 | The system shall provide its location with lane-level accuracy to on-board cooperative cruise control applications. | 01 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 068 | The system shall collect and process environmental sensor data, including air temperature and rain sensors. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. | ||
| 069 | The system shall monitor the status of vehicle convenience and safety systems (wiper status, headlight status, traction control system status) that can be used to measure environmental conditions and record snapshots of significant events in these systems | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. | ||
| 070 | The system shall transmit environmental probe data to field equipment located along the roadway using short range communications. | 04 | Traffic Operations needs to be able to disseminate speed and gap recommendations and other information to connected vehicles in a platoon on roads instrumented to allow infrastructure support of platooning. |
| 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. | ||
| 071 | The system shall provide data describing the vehicle's location in three dimensions, heading, speed, acceleration, braking status, and size. | 05 | Traffic Operations needs to monitor platoon vehicles to enable strings of vehicles to be more efficiently formed by sharing performance parameters and destinations. |
| 072 | The system shall receive intersection signal timing information in order for the vehicle to determine if it will safely cross the intersection given its current location and speed. | 01 | The Connected Vehicle needs information from other vehicles and the infrastructure to be able to move into a platoon and inform the vehicle driver of how, when, and where to safely join a platoon. |
| 02 | The Connected Vehicle needs to be able to operate in a platoon, including coordination of speed and gap policy with other vehicles in the platoon and the infrastructure. | ||