Link Type: Short Range Wireless
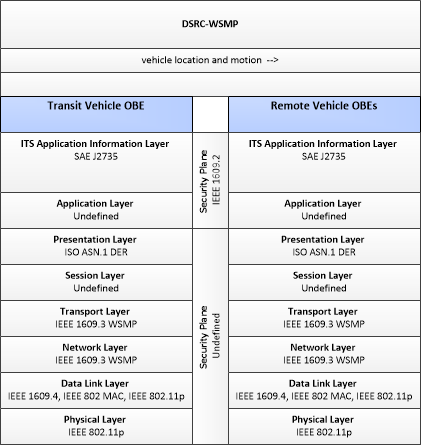
Transit Vehicle OBE --> Remote Vehicle OBEs:
vehicle location and motion
This triple is bi-directional. See also
Remote Vehicle OBEs --> Transit Vehicle OBE: vehicle location and motion
Definitions
vehicle location and motion (Information Flow): Data describing the vehicle's location in three dimensions, heading, speed, acceleration, braking status, and size.
Transit Vehicle OBE (Source Physical Object): The Transit Vehicle On-Board equipment (OBE) resides in a transit vehicle and provides the sensory, processing, storage, and communications functions necessary to support safe and efficient movement of passengers. The types of transit vehicles containing this physical object include buses, paratransit vehicles, light rail vehicles, other vehicles designed to carry passengers, and supervisory vehicles. It collects ridership levels and supports electronic fare collection. It supports a traffic signal prioritization function that communicates with the roadside physical object to improve on-schedule performance. Automated vehicle location enhances the information available to the transit operator enabling more efficient operations. On-board sensors support transit vehicle maintenance. The physical object supports on-board security and safety monitoring. This monitoring includes transit user or vehicle operator activated alarms (silent or audible), as well as surveillance and sensor equipment. The surveillance equipment includes video (e.g. CCTV cameras), audio systems and/or event recorder systems. It also furnishes travelers with real-time travel information, continuously updated schedules, transfer options, routes, and fares. In CVRIA, a separate 'Vehicle OBE' physical object supports the general V2V and V2I safety applications and other applications that apply to all vehicles, including transit vehicles. The Transit Vehicle OBE supplements these general capabilities with capabilities that are specific to transit vehicles.
Remote Vehicle OBEs (Destination Physical Object): 'Remote Vehicle OBEs' represents other connected vehicles that are communicating with the host vehicle. This includes all connected motorized vehicles including passenger cars, trucks, and motorcycles and specialty vehicles (e.g., maintenance vehicles, transit vehicles) that also include the basic 'Vehicle OBE' functionality that supports V2V communications. In CVRIA, this object provides a source and destination for information transfers between connected vehicles. The host vehicle on-board equipment, represented by the Vehicle OBE physical object, sends information to, and receives information from the Remote Vehicle OBEs to model all connected vehicle V2V communications in CVRIA.
Included In
This Information Flow is in the following Applications:
This Information Flow is in the following Application Objects:
Communication Diagrams
The communication diagram(s) can be viewed in SVG or PNG format and the current format is SVG. Switch to PNG format.
Characteristics
Architectural:
| Characteristic | Value |
|---|---|
| Time Context | Now |
| Spatial Context | Adjacent |
| Acknowledgement | False |
| Cardinality | Broadcast |
| Initiator | Source |
Security
This information flow triple is in the following applications with the following security levels.
| Information Flow Security | |||||
|---|---|---|---|---|---|
| Application | Confidentiality | Integrity | Availability | ||
| Basis | Basis | Basis | |||
| Security levels have not been defined yet. | |||||