Type: Support
Groups:- Core Services
Location and Time
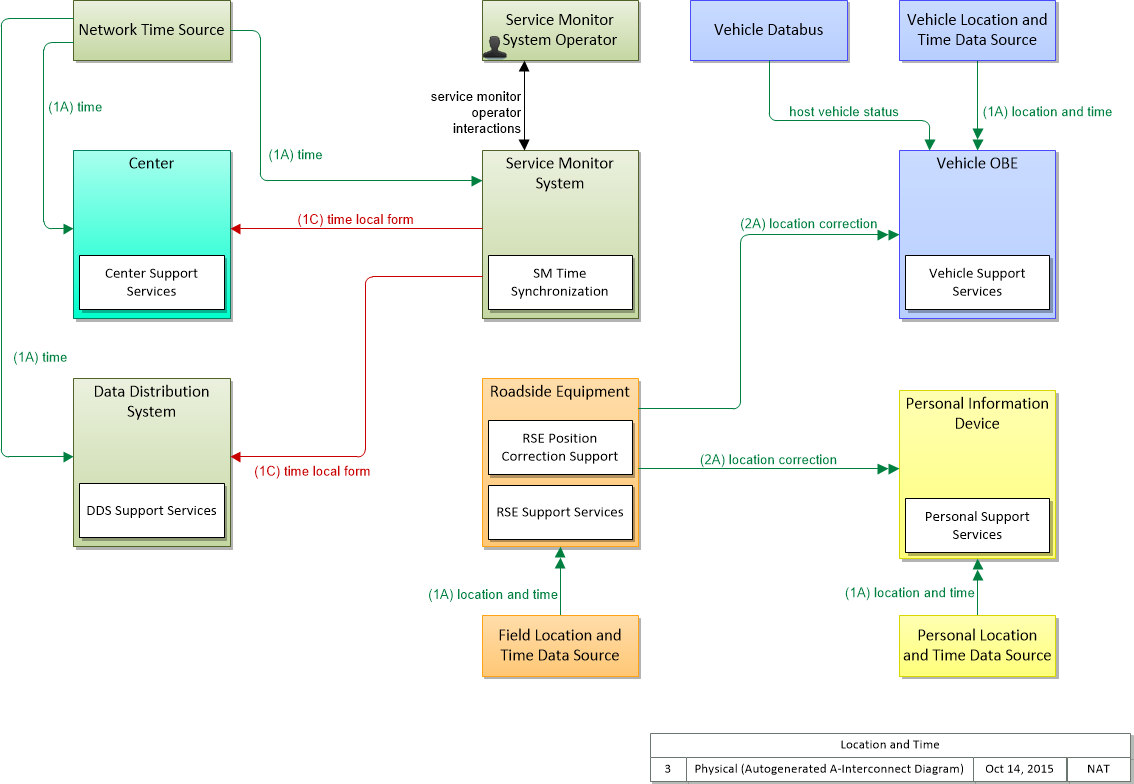
Location and Time is a support application that shows the external systems and their interfaces to provide accurate location and time to connected vehicle devices and systems.
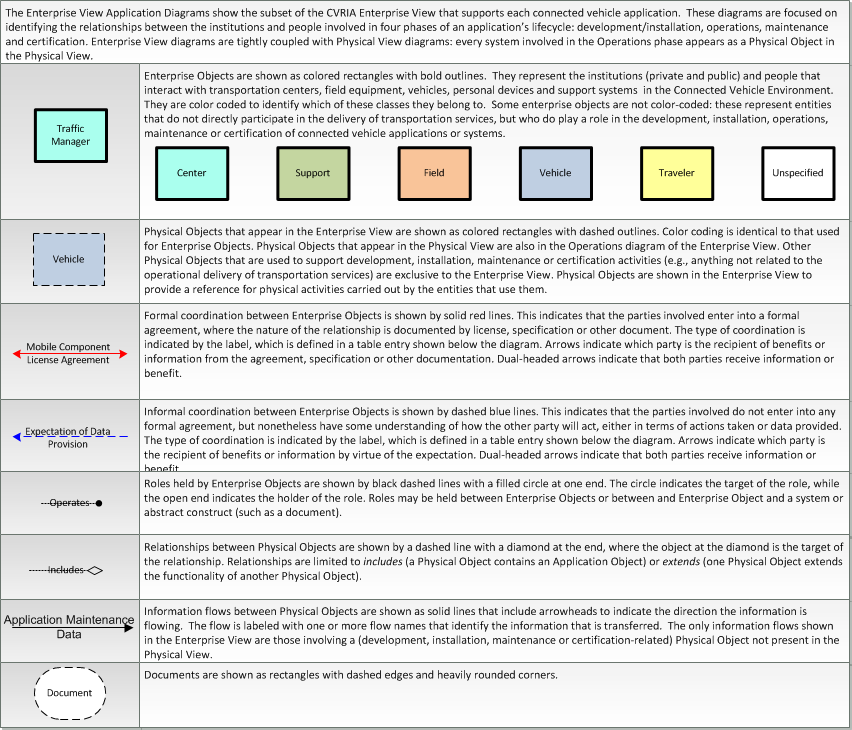
Enterprise
This is one way this application may be realized, but not the only way. There are other ways to build a given application and accomplish a stated objective.
The enterprise diagram can be viewed in SVG or PNG format and the current format is SVG. SVG Diagram
PNG Diagram
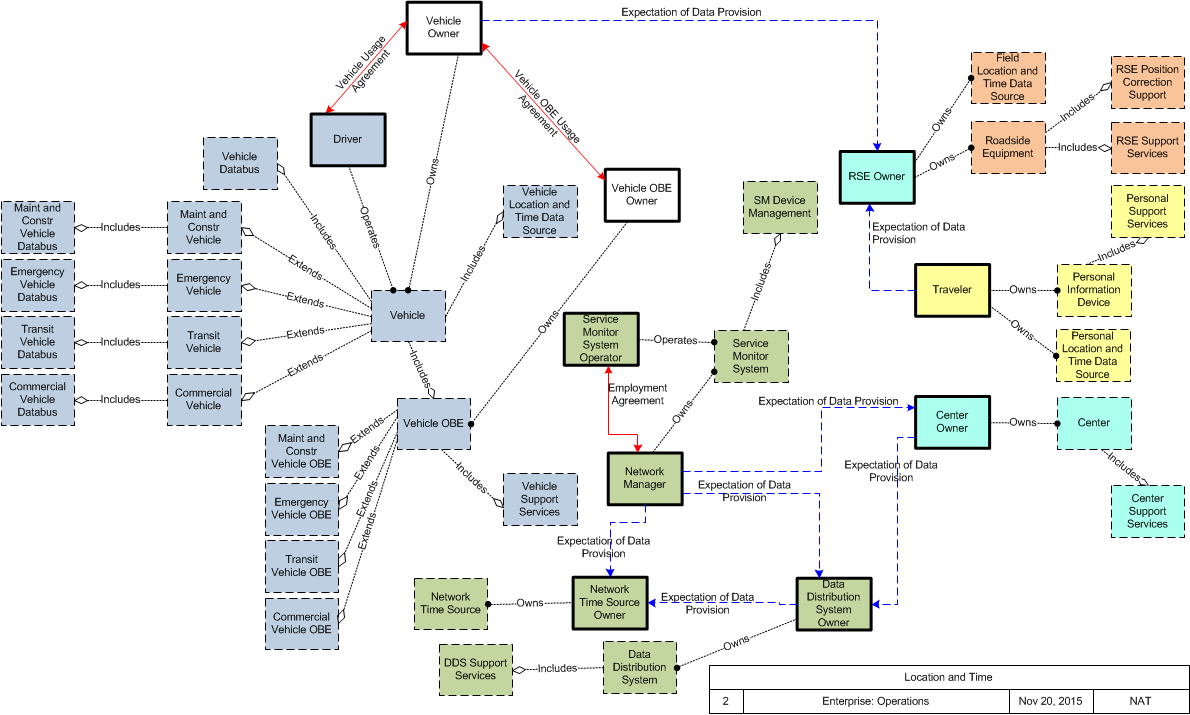
Business Interaction Matrix:
| Location and Time Operations Stage | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Vehicle Owner | Driver | Vehicle OBE Owner | RSE Owner | Traveler | Center Owner | Data Distribution System Owner | Service Monitor System Operator | Network Manager | Network Time Source Owner | |
| Vehicle Owner | Vehicle Usage Agreement | Vehicle OBE Usage Agreement | Expectation of Data Provision | |||||||
| Driver | Vehicle Usage Agreement | |||||||||
| Vehicle OBE Owner | Vehicle OBE Usage Agreement | |||||||||
| RSE Owner | Expectation of Data Provision | Expectation of Data Provision | ||||||||
| Traveler | Expectation of Data Provision | |||||||||
| Center Owner | Expectation of Data Provision | Expectation of Data Provision | ||||||||
| Data Distribution System Owner | Expectation of Data Provision | Expectation of Data Provision | Expectation of Data Provision | |||||||
| Service Monitor System Operator | Employment Agreement | |||||||||
| Network Manager | Expectation of Data Provision | Expectation of Data Provision | Employment Agreement | Expectation of Data Provision | ||||||
| Network Time Source Owner | Expectation of Data Provision | Expectation of Data Provision | ||||||||
Includes Enterprise Objects:
| Enterprise Object | Description |
|---|---|
| Center Owner | General representation of the owner of the general "Center" physical object. |
| Data Distribution System Owner | The enterprise charged with providing data distribution services in the connected vehicle environment. This enterprise serves as broker between information and data providers and consumers. |
| Driver | The 'Driver' represents the person that operates a vehicle on the roadway. Included are operators of private, transit, commercial, and emergency vehicles where the interactions are not particular to the type of vehicle (e.g., interactions supporting vehicle safety applications). The Driver originates driver requests and receives driver information that reflects the interactions which might be useful to all drivers, regardless of vehicle classification. Information and interactions which are unique to drivers of a specific vehicle type (e.g., fleet interactions with transit, commercial, or emergency vehicle drivers) are covered by separate objects. |
| Network Manager | The "Network Manager" represents the entity responsible for operating and maintaining the connected vehicle infrastructure including RSE and DDS, charged with monitoring its operational status and responding to operational issues related to monitored applications. |
| Network Time Source Owner | The owner of the time source used by Connected Vehicle Centers and support systems. |
| RSE Owner | The owner of roadside equipment. |
| Service Monitor System Operator | The 'Service Monitor System Operator' represents the person or people that monitor and manage the Service Monitor System. |
| Traveler | The 'Traveler' represents any individual who uses transportation services. The interfaces to the traveler provide general pre-trip and en-route information supporting trip planning, personal guidance, and requests for assistance in an emergency that are relevant to all transportation system users. It also represents users of a public transportation system and addresses interfaces these users have within a transit vehicle or at transit facilities such as roadside stops and transit centers. |
| Vehicle OBE Owner | The entity, individual, group or corporation that owns the Vehicle On-Board equipment. This could be the same as the Vehicle Owner, but it could be a third part that licenses the use of the OBE to the Owner. |
| Vehicle Owner | The individual, group of individuals or corporate entity that is identified as the registered owner of the Vehicle under state law. |
Includes Resources:
| Resource | Description |
|---|---|
| Center | This general physical object is used to model core capabilities that are common to any center. |
| Center Support Services | 'Center Support Services' provides foundational functions that support data collection, management, and distribution. It coordinates with Object Registration and Discovery to maintain its registration with respect to location/geographic scope and credentialing information. It maintains the necessary security credentials, authorizations, and associated keys to support communications in the connected vehicle environment. |
| Commercial Vehicle | The commercial vehicle includes the sensory, processing, storage, and communications functions necessary to support safe and efficient commercial vehicle operations. It includes two-way communications between the commercial vehicle drivers, their fleet managers, attached freight equipment, and roadside officials, and provides HAZMAT response teams with timely and accurate cargo contents information after a vehicle incident. It can collect and process vehicle, cargo information from the attached freight equipment, and driver safety data and status and alert the driver whenever there is a potential safety or security problem. Basic identification, security and safety status data are supplied to inspection facilities at mainline speeds. In addition, it can automatically collect and record mileage, fuel usage, and border crossings. |
| Commercial Vehicle Databus | The 'Commercial Vehicle Databus' represents the interface to the heavy vehicle databus that connects on-board systems included in the commercial vehicle. This vehicle is used to transport goods, is operated by a professional driver and typically administered as part of a larger fleet. Commercial Vehicle classification applies to all goods transport vehicles ranging from small panel vans used in local pick-up and delivery services to large, multi-axle tractor-trailer rigs operating on long haul routes. It is a specialized and extended form of the Vehicle Databus that may be subject to different vehicle databus standards and connect with a broad range of components that are specific to commercial vehicles including the systems that are used to monitor, secure, and maintain freight while enroute. As a specialized form of the Vehicle Databus, it also provides access to the general-purpose sensors (e.g., radars, cameras), GPS, drive train monitoring and control systems, and vehicle safety features that support connected vehicle applications. |
| Commercial Vehicle OBE | The Commercial Vehicle On-Board Equipment (OBE) resides in a commercial vehicle and provides the sensory, processing, storage, and communications functions necessary to support safe and efficient commercial vehicle operations. It provides two-way communications between the commercial vehicle drivers, their fleet managers, attached freight equipment, and roadside officials. In CVRIA, a separate 'Vehicle OBE' physical object supports the general V2V and V2I safety applications and other applications that apply to all vehicles, including commercial vehicles. The Commercial Vehicle OBE supplements these general capabilities with capabilities that are specific to commercial vehicles. |
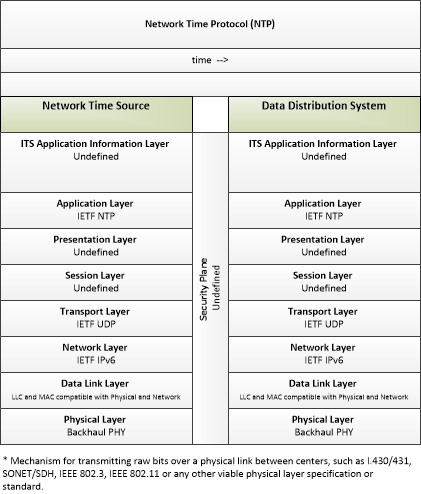
| Data Distribution System | The 'Data Distribution System' collects, processes, and distributes connected vehicle data, connecting data producers with data consumers and facilitating data exchange in the Connected Vehicle Environment. |
| DDS Support Services | "DDS Support Services" provides foundational functions that support data collection, management, and distribution. It coordinates with Object Registration and Discovery to maintain its registration with respect to location/geographic scope and credentialing information. It maintains the necessary security credentials, authorizations, and associated keys to support communications in the connected vehicle environment. It also provides an overall service monitoring function. |
| Emergency Vehicle | The "Emergency Vehicle" represents a range of vehicles including those operated by police, fire, and emergency medical services, as well as incident response vehicles including towing and recovery vehicles and freeway service patrols. |
| Emergency Vehicle Databus | The 'Emergency Vehicle Databus' represents the vehicle databus that interfaces with on-board equipment on a public safety vehicle. It is a specialized and extended form of the Vehicle Databus that may be subject to different vehicle databus standards and hosts a broad range of components that are specific to emergency vehicles including the lightbar/siren and on-board apparatus that supports law enforcement, firefighting, and emergency medical services. As a specialized form of the Vehicle Databus, it also provides access to the general-purpose sensors (e.g., radars, cameras), GPS, drive train monitoring and control systems, and vehicle safety features that support connected vehicle applications. In CVRIA, the 'Emergency Vehicle Databus' is used to represent the onboard interactions between the Emergency Vehicle OBE and the other systems included in a host emergency vehicle. |
| Emergency Vehicle OBE | The Emergency Vehicle On-Board Equipment (OBE) resides in an emergency vehicle and provides the processing, storage, and communications functions that support public safety-related connected vehicle applications. It represents a range of vehicles including those operated by police, fire, and emergency medical services. In addition, it represents other incident response vehicles including towing and recovery vehicles and freeway service patrols. It includes two-way communications to support coordinated response to emergencies. In CVRIA, a separate 'Vehicle OBE' physical object supports the general V2V and V2I safety applications and other applications that apply to all vehicles, including emergency vehicles. The Emergency Vehicle OBE supplements these general capabilities with capabilities that are specific to emergency vehicles. |
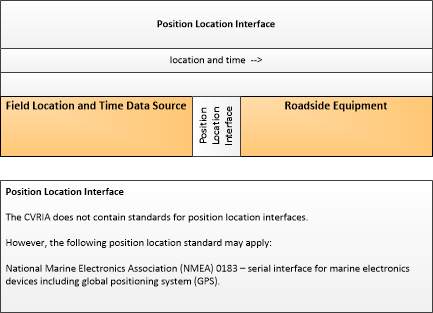
| Field Location and Time Data Source | The 'Field Location and Time Data Source' provides accurate position information for field devices such as Roadside Equipment (RSE). While a Global Positioning System (GPS) Receiver is the most common implementation, this physical object represents any technology that provides a position fix in three dimensions and time with sufficient accuracy. |
| Maint and Constr Vehicle | This physical object resides in a maintenance, construction, or other specialized service vehicle or equipment and provides the sensory, processing, storage, and communications functions necessary to support highway maintenance and construction. All types of maintenance and construction vehicles are covered, including heavy equipment and supervisory vehicles. The subsystem provides two-way communications between drivers/operators and dispatchers and maintains and communicates current location and status information. A wide range of operational status is monitored, measured, and made available, depending on the specific type of vehicle or equipment. For example, for a snow plow, the information would include whether the plow is up or down and material usage information. The subsystem may also contain capabilities to monitor vehicle systems to support maintenance of the vehicle itself and other sensors that monitor environmental conditions including the road condition and surface weather information. This subsystem can represent a diverse set of mobile environmental sensing platforms, including wheeled vehicles and any other vehicle that collects and reports environmental information. |
| Maint and Constr Vehicle Databus | The 'Maint and Constr Vehicle Databus' represents the interface to a vehicle databus that provides access to the maintenance-related sensors, GPS, drive train monitoring and control systems, and maintenance control systems that support connected vehicle applications. In CVRIA, this physical object is used to represent the onboard interactions between the OBE and the other systems included in a host vehicle. This interface is used to control the non-ITS systems such as the actual operation of the snow plow, as well as any non-ITS sensor equipment that monitors the amount of materials (e.g., sand or salt) on-board. |
| Maint and Constr Vehicle OBE | The 'Maint and Constr Vehicle OBE' resides in a maintenance, construction, or other specialized service vehicle or equipment and provides the processing, storage, and communications functions necessary to support highway maintenance and construction. All types of maintenance and construction vehicles are covered, including heavy equipment and supervisory vehicles. The MCV OBE provides two-way communications between drivers/operators and dispatchers and maintains and communicates current location and status information. A wide range of operational status is monitored, measured, and made available, depending on the specific type of vehicle or equipment. A snow plow for example, would monitor whether the plow is up or down and material usage information. The Maint and Constr Vehicle OBE may also contain capabilities to monitor vehicle systems to support maintenance of the vehicle itself and include sensors that monitor environmental conditions such as road condition and surface weather information. This can include a diverse set of mobile environmental sensing platforms, including wheeled vehicles and any other vehicle that collects and reports environmental information. In CVRIA, a separate 'Vehicle OBE' physical object supports the general V2V and V2I safety applications and other applications that apply to all vehicles, including maintenance and construction vehicles. The Maint and Constr Vehicle OBE supplements these general applications with applications that are specific to maintenance and construction vehicles. |
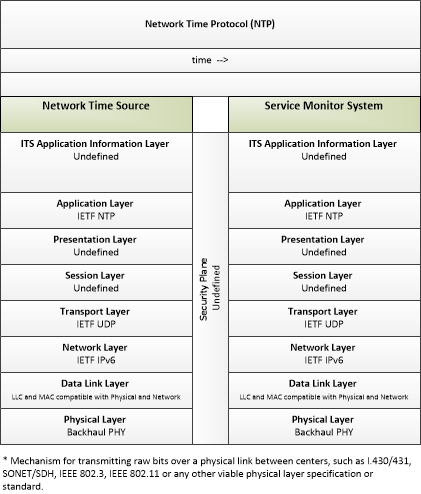
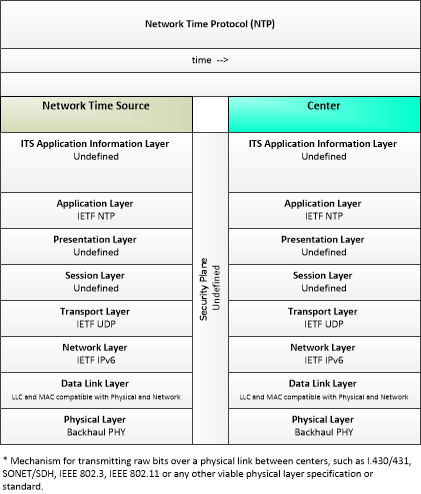
| Network Time Source | The 'Network Time Source' represents the external time source the Connected Vehicle Service Monitor System uses as the basis for time. This is likely implemented as a Stratum-2 Network Time Server that is 2 steps removed from a basic time source (e.g., atomic clock). |
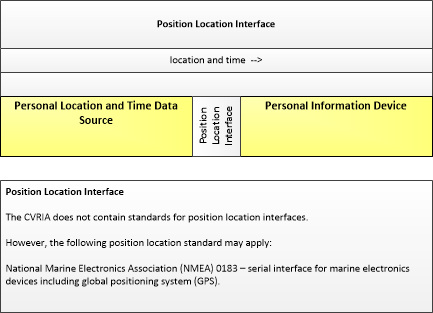
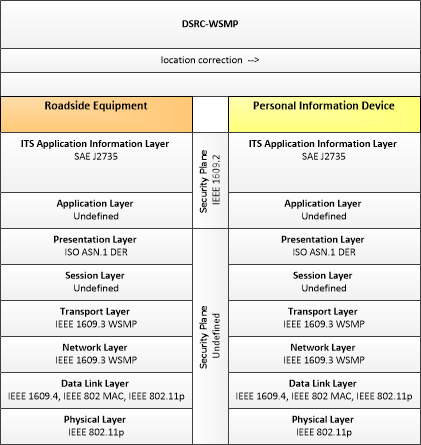
| Personal Information Device | The 'Personal Information Device' provides the capability for travelers to receive formatted traveler information wherever they are. Capabilities include traveler information, trip planning, and route guidance. Frequently a smart phone, the Personal Information Device provides travelers with the capability to receive route planning and other personally focused transportation services from the infrastructure in the field, at home, at work, or while en-route. Personal Information Devices may operate independently or may be linked with connected vehicle on-board equipment. |
| Personal Location and Time Data Source | The 'Personal Location and Time Data Source' provides accurate position information for personal mobile devices. While a Global Positioning System (GPS) Receiver is the most common implementation, this physical object represents any technology that provides a position fix in three dimensions and time with sufficient accuracy. |
| Personal Support Services | 'Personal Support Services' provides foundational functions that supports data collection, management, and distribution. It coordinates with Object Registration and Discovery to maintain its registration with respect to location/geographic scope and credentialing information. It maintains the necessary security credentials, authorizations, and associated keys to support communications in the connected vehicle environment. |
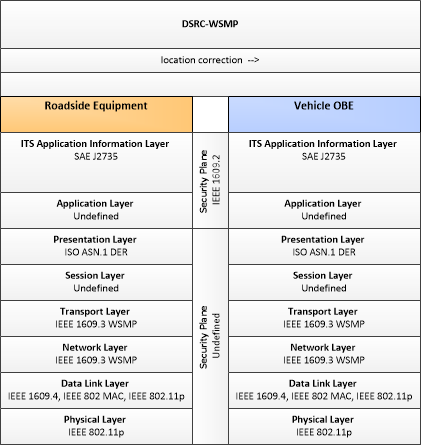
| Roadside Equipment | 'Roadside Equipment' (RSE) represents the Connected Vehicle roadside devices that are used to send messages to, and receive messages from, nearby vehicles using Dedicated Short Range Communications (DSRC) or other alternative wireless communications technologies. Communications with adjacent field equipment and back office centers that monitor and control the RSE are also supported. This device operates from a fixed position and may be permanently deployed or a portable device that is located temporarily in the vicinity of a traffic incident, road construction, or a special event. It includes a processor, data storage, and communications capabilities that support secure communications with passing vehicles, other field equipment, and centers. |
| RSE Position Correction Support | "RSE Position Correction Support" broadcasts differential positioning data to enable precise locations to be determined by passing vehicles, supporting Connected Vehicle applications that require highly accurate positioning. The differential positioning data may be calculated directly by a precisely located RSE that is operating as a reference station or received from an external reference station and relayed to passing vehicles. |
| RSE Support Services | 'RSE Support Services' provides foundational functions that supports data collection, management, and distribution. It coordinates with Object Registration and Discovery to maintain its registration with respect to location/geographic scope and credentialing information. It maintains the necessary security credentials, authorizations, and associated keys to support communications in the connected vehicle environment. |
| Service Monitor System | The 'Service Monitor System' represents one or more center-based systems that provide monitoring, management and control services necessary to other applications and/or devices operating within the Connected Vehicle Environment. These support services enable other applications to provide transportation services. |
| SM Device Management | 'SM Device Management' provides the functions necessary to manage devices, including network management, operational status monitoring, and application performance monitoring. |
| Transit Vehicle | The vehicle that provides the sensory, processing, storage, and communications functions necessary to support safe and efficient movement of passengers. This includes buses, paratransit vehicles, light rail vehicles, other vehicles designed to carry passengers, and supervisory vehicles. |
| Transit Vehicle Databus | The 'Transit Vehicle Databus' represents the vehicle databus that interfaces with on-board equipment on a transit vehicle. It is a specialized and extended form of the Vehicle Databus that is subject to different vehicle databus standards and hosts a broad range of components that are unique to a transit vehicle including the farebox and associated electronics, passenger counters, and transit security systems. As a specialized form of the Vehicle Databus, it also provides access to the general-purpose sensors (e.g., radars, cameras), GPS, drive train monitoring and control systems, and vehicle safety features that support connected vehicle applications. The Transit Vehicle may represent a bus, paratransit vehicle, light rail vehicle, or other vehicle designed to carry passengers. In CVRIA, the 'Transit Vehicle Databus' is used to represent the onboard interactions between the Transit Vehicle OBE and the other systems included in a host transit vehicle. |
| Transit Vehicle OBE | The Transit Vehicle On-Board equipment (OBE) resides in a transit vehicle and provides the sensory, processing, storage, and communications functions necessary to support safe and efficient movement of passengers. The types of transit vehicles containing this physical object include buses, paratransit vehicles, light rail vehicles, other vehicles designed to carry passengers, and supervisory vehicles. It collects ridership levels and supports electronic fare collection. It supports a traffic signal prioritization function that communicates with the roadside physical object to improve on-schedule performance. Automated vehicle location enhances the information available to the transit operator enabling more efficient operations. On-board sensors support transit vehicle maintenance. The physical object supports on-board security and safety monitoring. This monitoring includes transit user or vehicle operator activated alarms (silent or audible), as well as surveillance and sensor equipment. The surveillance equipment includes video (e.g. CCTV cameras), audio systems and/or event recorder systems. It also furnishes travelers with real-time travel information, continuously updated schedules, transfer options, routes, and fares. In CVRIA, a separate 'Vehicle OBE' physical object supports the general V2V and V2I safety applications and other applications that apply to all vehicles, including transit vehicles. The Transit Vehicle OBE supplements these general capabilities with capabilities that are specific to transit vehicles. |
| Vehicle | The conveyance that provides the sensory, processing, storage, and communications functions necessary to support efficient, safe, and convenient travel. These functions reside in general vehicles including personal automobiles, commercial vehicles, emergency vehicles, transit vehicles, or other vehicle types. |
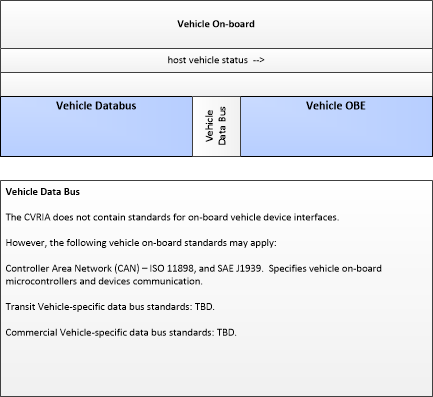
| Vehicle Databus | The 'Vehicle Databus' represents the interface to the vehicle databus (e.g., CAN, LIN, Ethernet/IP, FlexRay, and MOST) that may enable communication between the Vehicle OBE and other vehicle systems to support connected vehicle applications. The vehicle system statuses and/or sensor outputs available on the databus will vary based on the equipment installed on the vehicle and availability on databus. System statuses and sensor outputs may include select vehicle systems and sensors such as accelerometers, yaw rate sensors, and GPS derived location and timing information. In CVRIA, this physical object is used to represent the onboard interactions between the Vehicle OBE and the other systems included in a host vehicle. Note that the vehicle databus interface is not standardized across all vehicle classes. Also, some Vehicle OBE implementations will not have access to the vehicle databus. See 'Vehicle OBE' for more information. |
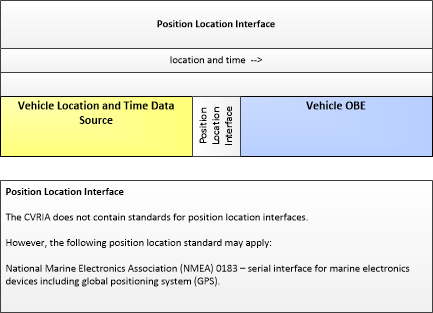
| Vehicle Location and Time Data Source | The 'Vehicle Location and Time Data Source' provides accurate position information for vehicle-based mobile devices. While a Global Positioning System (GPS) Receiver is the most common implementation, this physical object represents any technology that provides a position fix in three dimensions and time with sufficient accuracy. |
| Vehicle OBE | The Vehicle On-Board Equipment (OBE) provides the vehicle-based processing, storage, and communications functions necessary to support connected vehicle operations. The radio(s) supporting V2V and V2I communications are a key component of the Vehicle OBE. This communication platform is augmented with processing and data storage capability that supports the connected vehicle applications. In CVRIA, the Vehicle OBE includes the functions and interfaces that support connected vehicle applications for passenger cars, trucks, and motorcycles. Many of these applications (e.g., V2V Safety applications) apply to all vehicle types including personal vehicles, commercial vehicles, emergency vehicles, transit vehicles, and maintenance vehicles. From this perspective, the Vehicle OBE includes the common interfaces and functions that apply to all motorized vehicles. |
| Vehicle Support Services | 'Vehicle Support Services' provides foundational functions that supports data collection, management, and distribution. It coordinates with Object Registration and Discovery to acquire necessary communications information. It maintains the necessary security credentials, authorizations, and associated keys to support communications in the connected vehicle environment. |
Includes Roles:
| Role | Description |
|---|---|
| Operates | An Enterprise controls the functionality and state of the target Resource. An Enterprise that Operates a resource is considered Responsible. |
| Owns | An Enterprise has financial ownership and control over the Resource. An Enterprise that Owns a resource is considered Accountable. |
Includes Coordination:
| Coordination | Type | Description |
|---|---|---|
| Employment Agreement | Agreement | An agreement between an individual and a corporation or government entity, whereupon the individual agrees to provide labor to the corporation/agency, which in turn compensates the employee. Stipulates level of compensation, working conditions, necessary equipment and training and expectations of employee performance. |
| Expectation of Data Provision | Expectation | An expectation where one party believes another party will provide data on a regular and recurring basis, and that that data will be useful to the receiver in the context of the receiver's application. This thus includes some expectation of data fields, timeliness, quality, precision and similar qualities of data. |
| Extends | Includes | Indicates that one component includes all of the functionality of another component, and in provides additional functionality beyond that other component's. |
| Includes | Includes | Indicates that one component is entirely contained within another component. |
| Vehicle OBE Usage Agreement | Agreement | An agreement that grants one entity permission to use a Vehicle OBE that the other party controls. |
| Vehicle Usage Agreement | Agreement | An agreement between the owner of a vehicle and a prospective operator, whereupon the owner allows the operator to use the vehicle. |
Functional
Includes Processes:
Includes Data Flows:
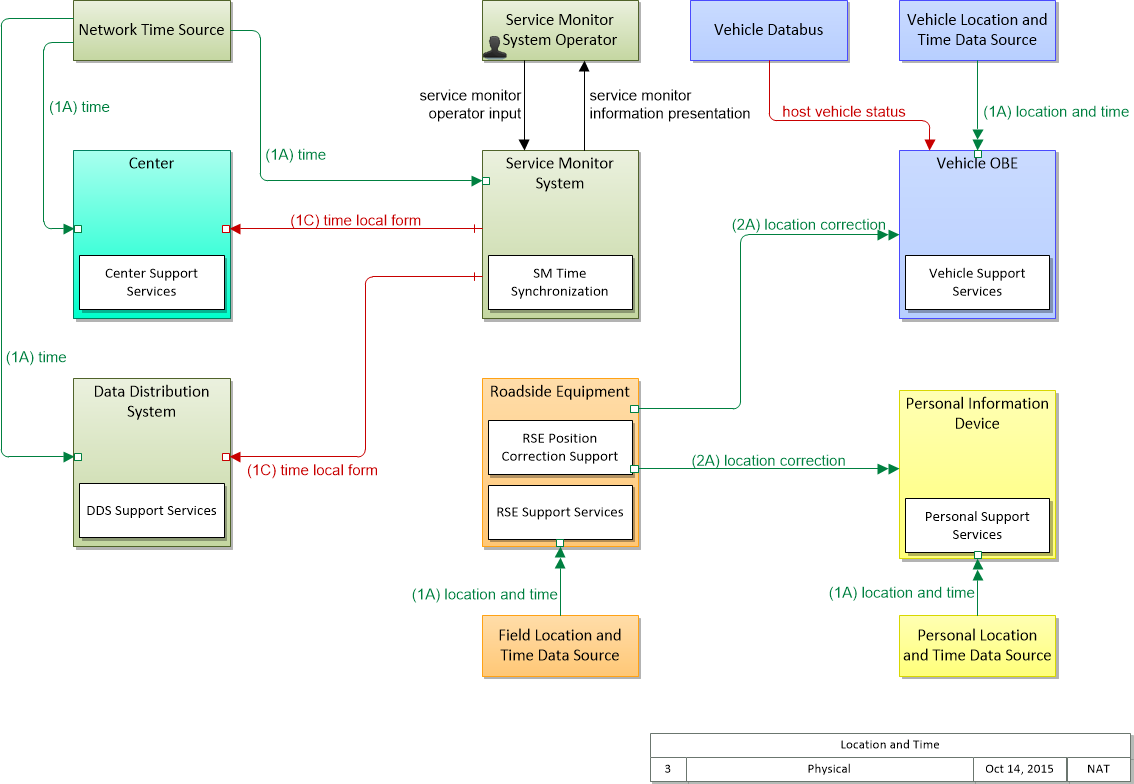
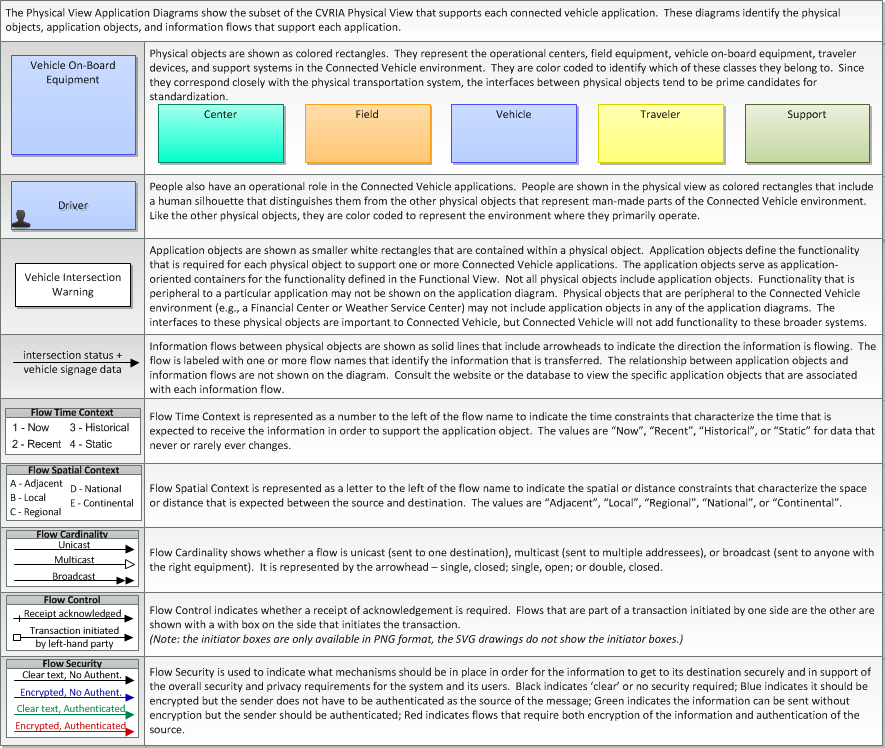
Physical
This is one way this application may be realized, but not the only way. There are other ways to build a given application and accomplish a stated objective.
The physical diagram can be viewed in SVG or PNG format and the current format is SVG. SVG Diagram
PNG Diagram
Includes Physical Objects:
| Physical Object | Class | Description |
|---|---|---|
| Center | Center | This general physical object is used to model core capabilities that are common to any center. |
| Data Distribution System | Support | The 'Data Distribution System' collects, processes, and distributes connected vehicle data, connecting data producers with data consumers and facilitating data exchange in the Connected Vehicle Environment. |
| Field Location and Time Data Source | Field | The 'Field Location and Time Data Source' provides accurate position information for field devices such as Roadside Equipment (RSE). While a Global Positioning System (GPS) Receiver is the most common implementation, this physical object represents any technology that provides a position fix in three dimensions and time with sufficient accuracy. |
| Network Time Source | Support | The 'Network Time Source' represents the external time source the Connected Vehicle Service Monitor System uses as the basis for time. This is likely implemented as a Stratum-2 Network Time Server that is 2 steps removed from a basic time source (e.g., atomic clock). |
| Personal Information Device | Traveler | The 'Personal Information Device' provides the capability for travelers to receive formatted traveler information wherever they are. Capabilities include traveler information, trip planning, and route guidance. Frequently a smart phone, the Personal Information Device provides travelers with the capability to receive route planning and other personally focused transportation services from the infrastructure in the field, at home, at work, or while en-route. Personal Information Devices may operate independently or may be linked with connected vehicle on-board equipment. |
| Personal Location and Time Data Source | Traveler | The 'Personal Location and Time Data Source' provides accurate position information for personal mobile devices. While a Global Positioning System (GPS) Receiver is the most common implementation, this physical object represents any technology that provides a position fix in three dimensions and time with sufficient accuracy. |
| Roadside Equipment | Field | 'Roadside Equipment' (RSE) represents the Connected Vehicle roadside devices that are used to send messages to, and receive messages from, nearby vehicles using Dedicated Short Range Communications (DSRC) or other alternative wireless communications technologies. Communications with adjacent field equipment and back office centers that monitor and control the RSE are also supported. This device operates from a fixed position and may be permanently deployed or a portable device that is located temporarily in the vicinity of a traffic incident, road construction, or a special event. It includes a processor, data storage, and communications capabilities that support secure communications with passing vehicles, other field equipment, and centers. |
| Service Monitor System | Support | The 'Service Monitor System' represents one or more center-based systems that provide monitoring, management and control services necessary to other applications and/or devices operating within the Connected Vehicle Environment. These support services enable other applications to provide transportation services. |
| Service Monitor System Operator | Support | The 'Service Monitor System Operator' represents the person or people that monitor and manage the Service Monitor System. |
| Vehicle Databus | Vehicle | The 'Vehicle Databus' represents the interface to the vehicle databus (e.g., CAN, LIN, Ethernet/IP, FlexRay, and MOST) that may enable communication between the Vehicle OBE and other vehicle systems to support connected vehicle applications. The vehicle system statuses and/or sensor outputs available on the databus will vary based on the equipment installed on the vehicle and availability on databus. System statuses and sensor outputs may include select vehicle systems and sensors such as accelerometers, yaw rate sensors, and GPS derived location and timing information. In CVRIA, this physical object is used to represent the onboard interactions between the Vehicle OBE and the other systems included in a host vehicle. Note that the vehicle databus interface is not standardized across all vehicle classes. Also, some Vehicle OBE implementations will not have access to the vehicle databus. See 'Vehicle OBE' for more information. |
| Vehicle Location and Time Data Source | Vehicle | The 'Vehicle Location and Time Data Source' provides accurate position information for vehicle-based mobile devices. While a Global Positioning System (GPS) Receiver is the most common implementation, this physical object represents any technology that provides a position fix in three dimensions and time with sufficient accuracy. |
| Vehicle OBE | Vehicle | The Vehicle On-Board Equipment (OBE) provides the vehicle-based processing, storage, and communications functions necessary to support connected vehicle operations. The radio(s) supporting V2V and V2I communications are a key component of the Vehicle OBE. This communication platform is augmented with processing and data storage capability that supports the connected vehicle applications. In CVRIA, the Vehicle OBE includes the functions and interfaces that support connected vehicle applications for passenger cars, trucks, and motorcycles. Many of these applications (e.g., V2V Safety applications) apply to all vehicle types including personal vehicles, commercial vehicles, emergency vehicles, transit vehicles, and maintenance vehicles. From this perspective, the Vehicle OBE includes the common interfaces and functions that apply to all motorized vehicles. |
Includes Application Objects:
| Application Object | Description | Physical Object |
|---|---|---|
| Center Support Services | 'Center Support Services' provides foundational functions that support data collection, management, and distribution. It coordinates with Object Registration and Discovery to maintain its registration with respect to location/geographic scope and credentialing information. It maintains the necessary security credentials, authorizations, and associated keys to support communications in the connected vehicle environment. | Center |
| DDS Support Services | "DDS Support Services" provides foundational functions that support data collection, management, and distribution. It coordinates with Object Registration and Discovery to maintain its registration with respect to location/geographic scope and credentialing information. It maintains the necessary security credentials, authorizations, and associated keys to support communications in the connected vehicle environment. It also provides an overall service monitoring function. | Data Distribution System |
| Personal Support Services | 'Personal Support Services' provides foundational functions that supports data collection, management, and distribution. It coordinates with Object Registration and Discovery to maintain its registration with respect to location/geographic scope and credentialing information. It maintains the necessary security credentials, authorizations, and associated keys to support communications in the connected vehicle environment. | Personal Information Device |
| RSE Position Correction Support | "RSE Position Correction Support" broadcasts differential positioning data to enable precise locations to be determined by passing vehicles, supporting Connected Vehicle applications that require highly accurate positioning. The differential positioning data may be calculated directly by a precisely located RSE that is operating as a reference station or received from an external reference station and relayed to passing vehicles. | Roadside Equipment |
| RSE Support Services | 'RSE Support Services' provides foundational functions that supports data collection, management, and distribution. It coordinates with Object Registration and Discovery to maintain its registration with respect to location/geographic scope and credentialing information. It maintains the necessary security credentials, authorizations, and associated keys to support communications in the connected vehicle environment. | Roadside Equipment |
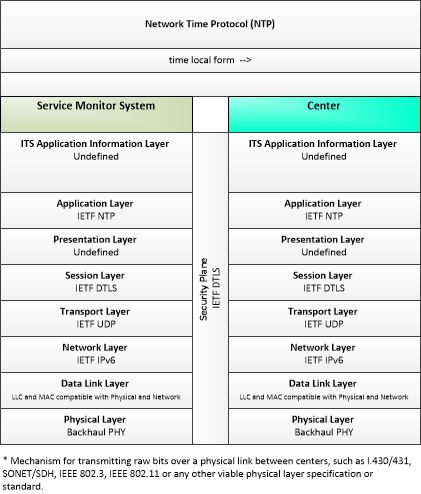
| SM Time Synchronization | "SM Time Synchronization" provides the functions necessary to receive accurate time from an external Network Time Server and provide that Coordinated Universal Time (UTC) as Time Local Form to other center systems and field devices. | Service Monitor System |
| Vehicle Support Services | 'Vehicle Support Services' provides foundational functions that supports data collection, management, and distribution. It coordinates with Object Registration and Discovery to acquire necessary communications information. It maintains the necessary security credentials, authorizations, and associated keys to support communications in the connected vehicle environment. | Vehicle OBE |
Includes Information Flows:
| Information Flow | Description |
|---|---|
| host vehicle status | Information provided to the connected vehicle on-board equipment from other systems on the vehicle platform. This includes data from on-board sensors, the current status of the powertrain, steering, and braking systems, and status of safety and convenience systems. In implementations where GPS is not integrated into the Vehicle On-Board Equipment, the host vehicle is also the source for data describing the vehicle's location in three dimensions (latitude, longitude, elevation) and accurate time that can be used for time synchronization across the Connected Vehicle environment. |
| location and time | The current geographic location in three dimensions (latitude, longitude, elevation) and the current time. |
| location correction | Information provided to improve positional accuracy. These corrections allow a mobile GPS receiver, such as a GPS system in a connected vehicle, to achieve a greater absolute positional accuracy, compensating for errors that exist in satellite positioning. |
| service monitor information presentation | Presentation of information to the System Monitoring Operator including current operational status of the System Monitoring function and the connected vehicle environment that is monitored. |
| service monitor operator input | User input from the SMS operator including requests to monitor current system operation and inputs to affect system operation. |
| time | Current time expressed in Universal Time Coordinated (UTC) format from a Stratum-2 time server. |
| time local form | Time local form includes UTC time synchronized with the external source in a format usable by connected vehicle center functions. |
Application Interconnect Diagram
This is one way this application may be realized, but not the only way. There are other ways to build a given application and accomplish a stated objective.
The application interconnect diagram can be viewed in SVG or PNG format and the current format is SVG. SVG Diagram
PNG Diagram
Application Triples

Requirements
| Need | Requirement | ||
|---|---|---|---|
| N4.001 | Applications need to protect data they handle from unauthorized access. This is required to support applications that exchange sensitive information, such as personally identifying or financial information, which if intercepted could compromise the privacy or financial records of the user. | 4.001 | Applications that function by exchanging data between entities shall be able to exchange encrypted data between those entities. |
| N4.002 | Applications need to establish trust between entities that operate components of the application. Such trust relationships are necessary so that applications can be assured that entities are who they say they are, and therefore trust the source and data it receives. | 4.002 | Applications shall verify that, for each entity on which an application component is installed, that entity is trusted by the provider of the application. |
| 4.003 | Applications shall be able to digitally sign all messages sent between entities. | ||
| 4.004 | Applications shall be able to verify the digital signature of received messages. | ||
| 4.005 | Digital signatures used to ensure trust shall be generated independently of the application sending the message to be signed. | ||
| N4.003 | Applications need to revoke the trust relationship they have between entities when necessary. A trusted entity may operate in a fashion that indicates it should no longer be trusted, in which case applications must have a way of revoking that trust. | 4.006 | Applications shall identify entities that provide messages to the application that are improperly formatted. |
| 4.007 | Applications shall identify entities that provide messages to the application that are logically inconsistent. | ||
| 4.008 | Applications shall revoke personal trust (trust by the application) when a repeated pattern of messages from a given entity falls outside of the applications tolerances. | ||
| 4.009 | Applications shall be able to report suspicious behavior to third party authentication providers. | ||
| 4.010 | Applications shall be able to accept messages from the third party authentication provider that identifies entities unworthy of trust. | ||
| 4.011 | Applications shall be able to revoke trust between itself and an entity if that entity is identified by the third party authentication provider as untrustworthy. | ||
| N4.004 | All participants in the Connected Vehicle Environment need to operate on a common time base. Coordination of time between the entities that operate applications as well as those providing Core services prevents internal errors and enables time-sensitive interactions between application components. | 4.012 | All applications shall use the same time source as the basis for timing. |
| N4.067 | Connected Vehicle Systems need to operate on a common time base. Coordination of time between the internal systems that comprise the connected vehicle environment prevents internal synchronization errors and enables time sensitive interactions with System Users. | 4.122 | Time Synchronization shall receive the Time message from an external reference time source. |
| 4.123 | Upon accepting the Time message from an external reference time source, Time Synchronization shall ensure that its contents meet the acceptance criteria for all of its data objects. | ||
| 4.124 | Upon receiving a valid Time message from an external time source, Time Synchronization shall send Coordinated Universal Time (UTC) as Time Local Form to other center systems. | ||
Related Sources
- Core System Concept of Operations (ConOps), Final revE, 10/24/2011
- Core System System Architecture Document (SAD), Final revC, 10/14/2011
- Vehicle Safety Communications Applications (VSC-A) Final Report, Final, 9/1/2011
- Vehicle-to-Infrastructure (V2I) Safety Applications Concept of Operation Document, Draft, 8/10/2012
Security
In order to participate in this application, each physical object should meet or exceed the following security levels.
| Physical Object Security | ||||
|---|---|---|---|---|
| Physical Object | Confidentiality | Integrity | Availability | Security Class |
| Security levels have not been defined yet. | ||||
In order to participate in this application, each information flow triple should meet or exceed the following security levels.
| Information Flow Security | |||||
|---|---|---|---|---|---|
| Source | Destination | Information Flow | Confidentiality | Integrity | Availability |
| Basis | Basis | Basis | |||
| Security levels have not been defined yet. | |||||