Type: Safety
Groups:- V2V Safety
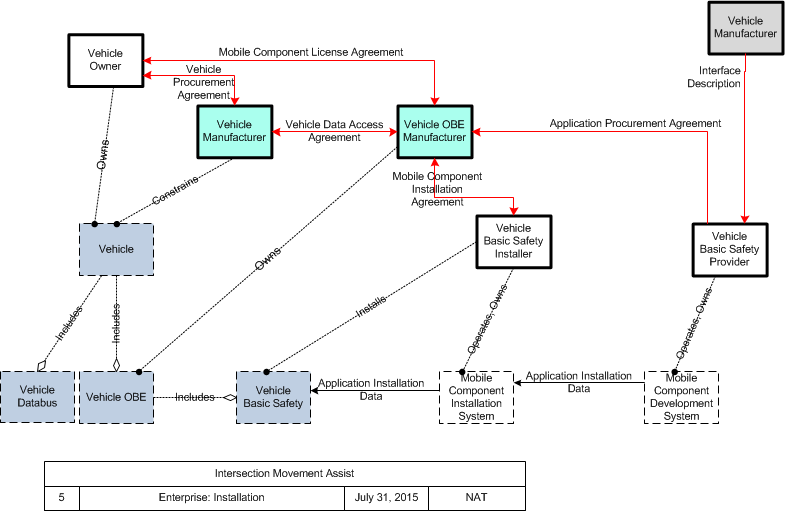
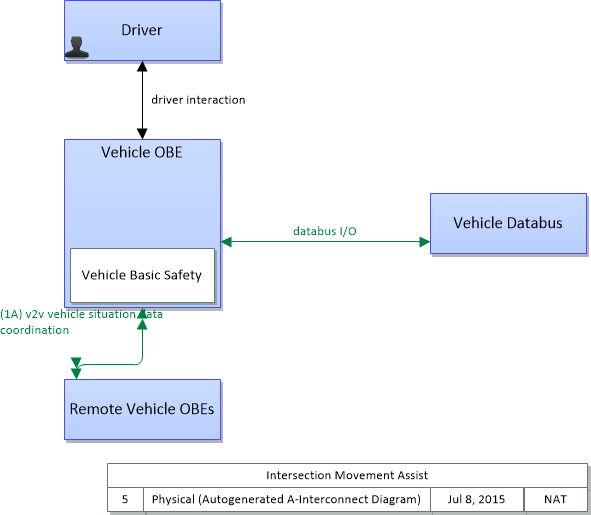
Intersection Movement Assist
The Intersection Movement Assist (IMA) application warns the driver of a vehicle when it is not safe to enter an intersection due to high collision probability with other vehicles at stop sign controlled and uncontrolled intersections. This application can provide collision warning information to the vehicle operational systems which may perform actions to reduce the likelihood of crashes at the intersections.
Enterprise
This is one way this application may be realized, but not the only way. There are other ways to build a given application and accomplish a stated objective.
The enterprise diagram can be viewed in SVG or PNG format and the current format is SVG. SVG Diagrams: Installation Operations Maintenance Certification
PNG Diagrams: Installation Operations Maintenance Certification
Business Interaction Matrix:
| Intersection Movement Assist Operations Stage | |||||
|---|---|---|---|---|---|
| Vehicle Owner | Driver | Vehicle OBE Owner | Remote Vehicle OBE Owner | Vehicle Basic Safety Provider | |
| Vehicle Owner | Vehicle Usage Agreement | Vehicle OBE Usage Agreement | Application Usage Agreement | ||
| Driver | Vehicle Usage Agreement | Expectation of Information Provision | Presumption of Correct Operation | ||
| Vehicle OBE Owner | Vehicle OBE Usage Agreement | Expectation of Information Provision | Expectation of Data Provision | ||
| Remote Vehicle OBE Owner | Presumption of Correct Operation | Expectation of Data Provision | |||
| Vehicle Basic Safety Provider | Application Usage Agreement | ||||
Includes Enterprise Objects:
| Enterprise Object | Description |
|---|---|
| Application Certification Entity | The body that determines whether an application may be deployed and operated in the Connected Vehicle Environment. This entity's composition, the requirements it applies and the procedures it uses to verify those requirements may vary with application type. For example, applications with human safety component (crash avoidance, movement assistance etc.) may have stringent requirements and extensive testing in a variety of conditions, while applications that provide strictly mobility functionality may have far less testing requirements; possibly as little as just making sure the application doesn't interfere with any other applications. |
| Device Certification Entity | The body that determines whether a device may be deployed and operated in the Connected Vehicle Environment. This entity's composition, the requirements it applies and the procedures it uses to verify those requirements may vary with device type. |
| Driver | The 'Driver' represents the person that operates a vehicle on the roadway. Included are operators of private, transit, commercial, and emergency vehicles where the interactions are not particular to the type of vehicle (e.g., interactions supporting vehicle safety applications). The Driver originates driver requests and receives driver information that reflects the interactions which might be useful to all drivers, regardless of vehicle classification. Information and interactions which are unique to drivers of a specific vehicle type (e.g., fleet interactions with transit, commercial, or emergency vehicle drivers) are covered by separate objects. |
| Federal Regulatory | Federal regulatory bodies that have legal authority to control and/or provide input to policies regulating transportation infrastructure and operations. This includes entities such as the Federal Communications Commission and US Department of Transportation. |
| Remote Vehicle OBE Owner | The owner of the Remote Vehicle OBE |
| State Regulatory | State regulatory bodies that have legal authority to control and/or provide input to policies regulating vehicles, transportation infrastructure and operations. This includes entities like Departments of Motor Vehicles, property tax authorities and tolling agencies. |
| Vehicle Basic Safety Installer | Application Component Installers are specified more by role than by function. Installers are responsible for the installation of the application component, which may require a support system, and may entail agreements and relationships between end users and application providers. |
| Vehicle Basic Safety Maintainer | Application Component Maintainers are specified more by role than by function. Maintainers are responsible for the maintenance (configuration changes, patches and updates, hardware repairs) of the application component, which may require a support system, and may entail agreements and relationships between end users and application providers. |
| Vehicle Basic Safety Provider | Application Component Providers are specified more by role than by function. Providers are responsible for the development of the application component, including initial creation, enhancement and bug fixes. Delivery of the application to the end user may require relationships with other entities (installers, maintainers) if the provider chooses not to fulfill those roles. |
| Vehicle Manufacturer | The entity that builds, assembles, verifies and validates the Vehicle in which the Vehicle OBE will eventually operate. |
| Vehicle OBE Manufacturer | The entity that builds, assembles, verifies and validates the Vehicle OBE. This can be an OEM-equipped OBE, retrofit or aftermarket equipment. |
| Vehicle OBE Owner | The entity, individual, group or corporation that owns the Vehicle On-Board equipment. This could be the same as the Vehicle Owner, but it could be a third part that licenses the use of the OBE to the Owner. |
| Vehicle Owner | The individual, group of individuals or corporate entity that is identified as the registered owner of the Vehicle under state law. |
Includes Resources:
| Resource | Description |
|---|---|
| Application Component Certification Requirements | The requirements that define the functionality, performance and operational environment of an application component. Certification Requirements must be met in order for an application to be installed in the CVE. |
| Device Certification Requirements | The requirements that define the functionality, performance and operational environment of a connected vehicle device. Certification Requirements must be met in order for the device to be granted the credentials necessary to operate in the Connected Vehicle Environment. |
| Mobile Component Development System | The system used in a backoffice environment to develop and test the mobile component of the application. |
| Mobile Component Installation System | The system that interacts with the Vehicle OBE other mobile device and installs the mobile component of the application. |
| Mobile Component Maintenance System | The system used to configure changes and updates to the mobile component of the application. This system is capable of acquiring and reporting diagnostic information about the application's configuration and performance. |
| Remote Vehicle OBEs | 'Remote Vehicle OBEs' represents other connected vehicles that are communicating with the host vehicle. This includes all connected motorized vehicles including passenger cars, trucks, and motorcycles and specialty vehicles (e.g., maintenance vehicles, transit vehicles) that also include the basic 'Vehicle OBE' functionality that supports V2V communications. In CVRIA, this object provides a source and destination for information transfers between connected vehicles. The host vehicle on-board equipment, represented by the Vehicle OBE physical object, sends information to, and receives information from the Remote Vehicle OBEs to model all connected vehicle V2V communications in CVRIA. |
| Vehicle | The conveyance that provides the sensory, processing, storage, and communications functions necessary to support efficient, safe, and convenient travel. These functions reside in general vehicles including personal automobiles, commercial vehicles, emergency vehicles, transit vehicles, or other vehicle types. |
| Vehicle Basic Safety | "Vehicle Basic Safety" exchanges current vehicle location and motion information with other vehicles in the vicinity, uses that information to calculate vehicle paths, and warns the driver when the potential for an impending collision is detected. If available, map data is used to filter and interpret the relative location and motion of vehicles in the vicinity. Information from on-board sensors (e.g., radars and image processing) are also used, if available, in combination with the V2V communications to detect non-equipped vehicles and corroborate connected vehicle data. Vehicle location and motion broadcasts are also received by the infrastructure and used by the infrastructure to support a wide range of roadside safety and mobility applications. This object represents a broad range of implementations ranging from basic Vehicle Awareness Devices that only broadcast vehicle location and motion and provide no driver warnings to advanced integrated safety systems that may, in addition to warning the driver, provide collision warning information to support automated control functions that can support control intervention. |
| Vehicle Databus | The 'Vehicle Databus' represents the interface to the vehicle databus (e.g., CAN, LIN, Ethernet/IP, FlexRay, and MOST) that may enable communication between the Vehicle OBE and other vehicle systems to support connected vehicle applications. The vehicle system statuses and/or sensor outputs available on the databus will vary based on the equipment installed on the vehicle and availability on databus. System statuses and sensor outputs may include select vehicle systems and sensors such as accelerometers, yaw rate sensors, and GPS derived location and timing information. In CVRIA, this physical object is used to represent the onboard interactions between the Vehicle OBE and the other systems included in a host vehicle. Note that the vehicle databus interface is not standardized across all vehicle classes. Also, some Vehicle OBE implementations will not have access to the vehicle databus. See 'Vehicle OBE' for more information. |
| Vehicle OBE | The Vehicle On-Board Equipment (OBE) provides the vehicle-based processing, storage, and communications functions necessary to support connected vehicle operations. The radio(s) supporting V2V and V2I communications are a key component of the Vehicle OBE. This communication platform is augmented with processing and data storage capability that supports the connected vehicle applications. In CVRIA, the Vehicle OBE includes the functions and interfaces that support connected vehicle applications for passenger cars, trucks, and motorcycles. Many of these applications (e.g., V2V Safety applications) apply to all vehicle types including personal vehicles, commercial vehicles, emergency vehicles, transit vehicles, and maintenance vehicles. From this perspective, the Vehicle OBE includes the common interfaces and functions that apply to all motorized vehicles. |
Includes Roles:
| Role | Description |
|---|---|
| Certifies | An Enterprise verifies that a target Resource meets relevant performance, functional, environmental and quality requirements. |
| Constrains | A Resource or Enterprise applies requirements, constraints and associated tests to another Resource. |
| Installs | An Enterprise performs the initial delivery, integration and configuration of the target Resource. |
| Maintains | An Enterprise administers the hardware and software that comprise the target Resource. |
| Member | An Enterprise is part of another larger, target Enterprise. |
| Operates | An Enterprise controls the functionality and state of the target Resource. An Enterprise that Operates a resource is considered Responsible. |
| Owns | An Enterprise has financial ownership and control over the Resource. An Enterprise that Owns a resource is considered Accountable. |
Includes Coordination:
| Coordination | Type | Description |
|---|---|---|
| Application Installation Data | Information Sharing | Data needed to install the application, including the application executable code and any configuration data. Unidirectional flow. |
| Application Maintenance Data | Information Sharing | Data used to facilitate the upgrade, patching and general health maintenance of an application component. |
| Application Performance Data | Information Sharing | Data used to characterize application performance, including such measures as availability, known errors and known uses. |
| Application Procurement Agreement | Agreement | An agreement whereupon one entity provides a copy of an application component to another entity. This component is capable of being installed and functioning, according to its requirements that passed through the application's certification process. |
| Application Usage Agreement | Agreement | An agreement in which one entity that controls an application component's use gives the other entity the necessary tools and permission to operate that application or application component. |
| Expectation of Data Provision | Expectation | An expectation where one party believes another party will provide data on a regular and recurring basis, and that that data will be useful to the receiver in the context of the receiver's application. This thus includes some expectation of data fields, timeliness, quality, precision and similar qualities of data. |
| Expectation of Information Provision | Expectation | An expectation where one party believes another party will provide it information whenever such information is likely relevant to the recipient. |
| Includes | Includes | Indicates that one component is entirely contained within another component. |
| Interface Description | Agreement | Documentation of the interface between two systems, where one system does not have an application component that is part of the application, but does provide and/or receive data and/or information that is used by or sourced from the application. In many cases this is an existing interface used by the application, so the description of the interface already exists and is imposed by the terminator. |
| Maintenance Data Exchange Agreement | Agreement | An agreement that states one entity will provide data related to maintenance of an application component to the other entity. |
| Mobile Component Installation Agreement | Agreement | An agreement whereupon the controller of OBE gives another party permission to install, configure and make operational a component that enables the mobile portion of an application. |
| Mobile Component License Agreement | Agreement | An end-user license agreement allowing the operator of the mobile device to use the mobile application component that is part of the application in question. |
| Mobile Component Maintenance Agreement | Agreement | An agreement in which one entity maintains the operational status of the mobile component of an application under the control of another entity. This maintenance may include routine and as-needed maintenance, such as software update and configuration, hardware replacement and related system administration activities. |
| Presumption of Correct Operation | Expectation | The assumption made by one party that another party operates their device in a similar and correct fashion. Specific to devices in the transportation environment, this assumption is relevant when devices interact, where one party's device receives information from another's. The operator of the device implicitly trusts that the other device is operating according to a similar set of governing rules as its device. |
| Vehicle Data Access Agreement | Agreement | An agreement whereby the party that controls access to on-board vehicle data grants another party the right and ability to access that data. Includes the conditions under which data may be accessed, and specifies the mechanisms, including physical and functional access methods, data formats and any other considerations necessary for the accessing party to acquire data. May also include caveats regarding responsibility for data quality and responsibility for use of the data. |
| Vehicle OBE Usage Agreement | Agreement | An agreement that grants one entity permission to use a Vehicle OBE that the other party controls. |
| Vehicle Procurement Agreement | Agreement | The exchange of a vehicle for compensation. One entity purchases the vehicle from the other. |
| Vehicle Usage Agreement | Agreement | An agreement between the owner of a vehicle and a prospective operator, whereupon the owner allows the operator to use the vehicle. |
| Warranty | Agreement | A guarantee or promise made by one entity to another, that provides assurance of the functionality and performance over time of an application component. |
Functional
Includes Processes:
| Level | Name | Type | Allocated to Application Object |
|---|---|---|---|
| 3.1 | Monitor Vehicle Status | Collection | |
| 3.1.1 | Produce Collision and Crash Avoidance Data | Pspec |
- Vehicle Basic Safety |
| 3.1.2 | Carry-out Safety Analysis | Pspec | |
| 3.1.3 | Process Vehicle On-board Data | Pspec |
- Vehicle Basic Safety |
| 3.1.4 | Communicate with Remote Vehicles | Pspec |
- Vehicle Basic Safety |
| 6.7 | Provide Driver Personal Services | Collection | |
| 6.7.3 | Provide Traveler Services in Vehicle | Collection | |
| 6.7.3.2 | Provide Driver with Personal Travel Information | Pspec | |
| 6.7.3.3 | Provide Driver Information Interface | Pspec |
- Vehicle Basic Safety |
Includes Data Flows:
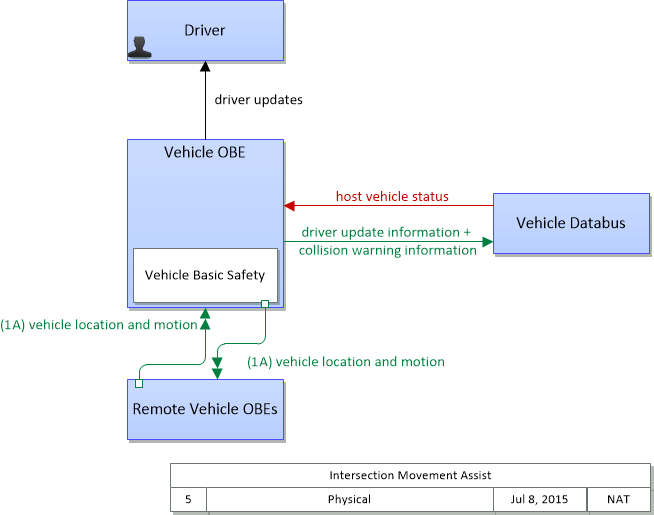
Physical
This is one way this application may be realized, but not the only way. There are other ways to build a given application and accomplish a stated objective.
The physical diagram can be viewed in SVG or PNG format and the current format is SVG. SVG Diagram
PNG Diagram
Includes Physical Objects:
| Physical Object | Class | Description |
|---|---|---|
| Driver | Vehicle | The 'Driver' represents the person that operates a vehicle on the roadway. Included are operators of private, transit, commercial, and emergency vehicles where the interactions are not particular to the type of vehicle (e.g., interactions supporting vehicle safety applications). The Driver originates driver requests and receives driver information that reflects the interactions which might be useful to all drivers, regardless of vehicle classification. Information and interactions which are unique to drivers of a specific vehicle type (e.g., fleet interactions with transit, commercial, or emergency vehicle drivers) are covered by separate objects. |
| Remote Vehicle OBEs | Vehicle | 'Remote Vehicle OBEs' represents other connected vehicles that are communicating with the host vehicle. This includes all connected motorized vehicles including passenger cars, trucks, and motorcycles and specialty vehicles (e.g., maintenance vehicles, transit vehicles) that also include the basic 'Vehicle OBE' functionality that supports V2V communications. In CVRIA, this object provides a source and destination for information transfers between connected vehicles. The host vehicle on-board equipment, represented by the Vehicle OBE physical object, sends information to, and receives information from the Remote Vehicle OBEs to model all connected vehicle V2V communications in CVRIA. |
| Vehicle Databus | Vehicle | The 'Vehicle Databus' represents the interface to the vehicle databus (e.g., CAN, LIN, Ethernet/IP, FlexRay, and MOST) that may enable communication between the Vehicle OBE and other vehicle systems to support connected vehicle applications. The vehicle system statuses and/or sensor outputs available on the databus will vary based on the equipment installed on the vehicle and availability on databus. System statuses and sensor outputs may include select vehicle systems and sensors such as accelerometers, yaw rate sensors, and GPS derived location and timing information. In CVRIA, this physical object is used to represent the onboard interactions between the Vehicle OBE and the other systems included in a host vehicle. Note that the vehicle databus interface is not standardized across all vehicle classes. Also, some Vehicle OBE implementations will not have access to the vehicle databus. See 'Vehicle OBE' for more information. |
| Vehicle OBE | Vehicle | The Vehicle On-Board Equipment (OBE) provides the vehicle-based processing, storage, and communications functions necessary to support connected vehicle operations. The radio(s) supporting V2V and V2I communications are a key component of the Vehicle OBE. This communication platform is augmented with processing and data storage capability that supports the connected vehicle applications. In CVRIA, the Vehicle OBE includes the functions and interfaces that support connected vehicle applications for passenger cars, trucks, and motorcycles. Many of these applications (e.g., V2V Safety applications) apply to all vehicle types including personal vehicles, commercial vehicles, emergency vehicles, transit vehicles, and maintenance vehicles. From this perspective, the Vehicle OBE includes the common interfaces and functions that apply to all motorized vehicles. |
Includes Application Objects:
| Application Object | Description | Physical Object |
|---|---|---|
| Vehicle Basic Safety | "Vehicle Basic Safety" exchanges current vehicle location and motion information with other vehicles in the vicinity, uses that information to calculate vehicle paths, and warns the driver when the potential for an impending collision is detected. If available, map data is used to filter and interpret the relative location and motion of vehicles in the vicinity. Information from on-board sensors (e.g., radars and image processing) are also used, if available, in combination with the V2V communications to detect non-equipped vehicles and corroborate connected vehicle data. Vehicle location and motion broadcasts are also received by the infrastructure and used by the infrastructure to support a wide range of roadside safety and mobility applications. This object represents a broad range of implementations ranging from basic Vehicle Awareness Devices that only broadcast vehicle location and motion and provide no driver warnings to advanced integrated safety systems that may, in addition to warning the driver, provide collision warning information to support automated control functions that can support control intervention. | Vehicle OBE |
Includes Information Flows:
| Information Flow | Description |
|---|---|
| collision warning information | Information provided to support computer-based intervention of vehicle controls. Analogous to driver warnings, these are warnings issued to on-board control systems of an impending collision or other situation detected by the Vehicle OBE that may require control intervention. |
| driver update information | Information provided to the driver-vehicle interface to inform the driver about current conditions, potential hazards, and the current status of vehicle on-board equipment. The flow includes the information to be presented to the driver and associated metadata that supports processing, prioritization, and presentation by the DVI as visual displays, audible information and warnings, and/or haptic feedback. |
| driver updates | Information provided to the driver including visual displays, audible information and warnings, and haptic feedback. The updates inform the driver about current conditions, potential hazards, and the current status of vehicle on-board equipment. |
| host vehicle status | Information provided to the connected vehicle on-board equipment from other systems on the vehicle platform. This includes data from on-board sensors, the current status of the powertrain, steering, and braking systems, and status of safety and convenience systems. In implementations where GPS is not integrated into the Vehicle On-Board Equipment, the host vehicle is also the source for data describing the vehicle's location in three dimensions (latitude, longitude, elevation) and accurate time that can be used for time synchronization across the Connected Vehicle environment. |
| vehicle location and motion | Data describing the vehicle's location in three dimensions, heading, speed, acceleration, braking status, and size. |
Application Interconnect Diagram
This is one way this application may be realized, but not the only way. There are other ways to build a given application and accomplish a stated objective.
The application interconnect diagram can be viewed in SVG or PNG format and the current format is SVG. SVG Diagram
PNG Diagram
Application Triples
| Communications Diagram(s) |
Source | Destination | Information Flow | 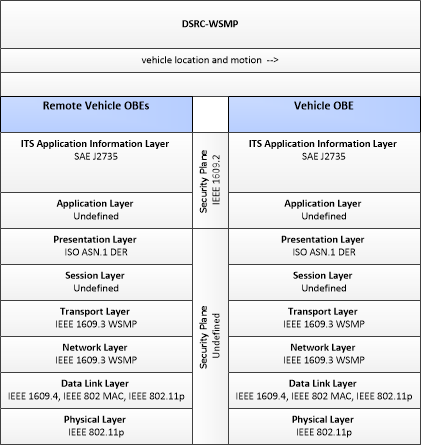 |
Remote Vehicle OBEs | Vehicle OBE | vehicle location and motion | 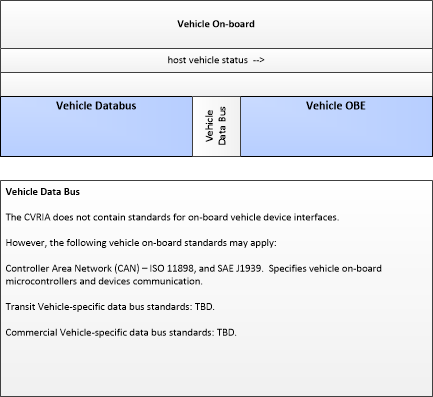 |
Vehicle Databus | Vehicle OBE | host vehicle status | 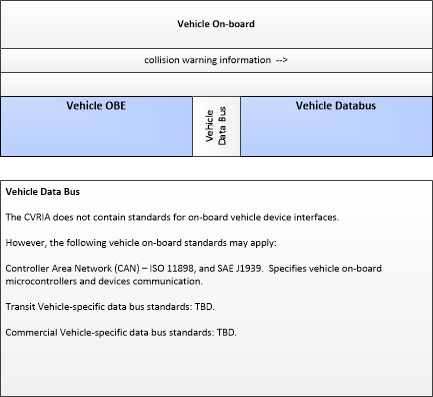 |
Vehicle OBE | Vehicle Databus | collision warning information | 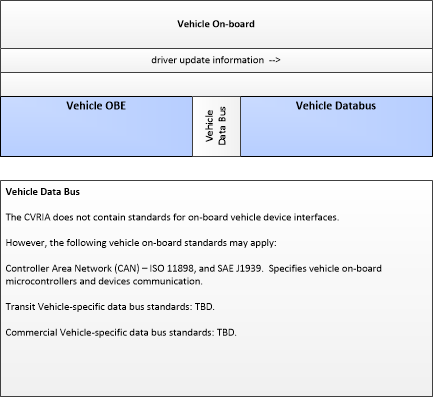 |
Vehicle OBE | Vehicle Databus | driver update information | None: Human interface | Vehicle OBE | Driver | driver updates | 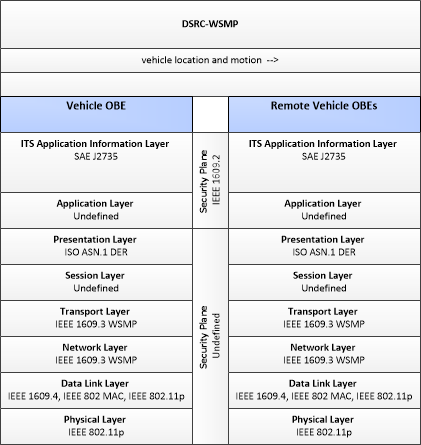 |
Vehicle OBE | Remote Vehicle OBEs | vehicle location and motion |
|---|
Requirements
| Need | Requirement | ||
|---|---|---|---|
| N3.027 | Intersection Movement Assist (IMA) needs to know when a vehicle faces an impending collision with a vehicle in an intersection that the Vehicle is about to enter. | 3.058 | Intersection Movement Assist (IMA) shall acquire the current location and motion of the host vehicle to determine the likelihood of crashing with a remote vehicle in the intersection. |
| 3.063 | IMA shall acquire the current location and motion of remote vehicles to determine the likelihood that the host vehicle will crash with a remote vehicle. | ||
| N3.028 | IMA needs to be able to warn the driver of an impending possible crash if proceeding through the intersection. | 3.057 | IMA shall provide warnings to the driver of a vehicle that is entering an intersection regarding unsafe conditions that could lead to a collision with a crossing vehicle. |
| N3.109 | Vehicle to Vehicle (V2V) Safety applications need to assess their own performance, to determine errors and properly enter fail-safe mode when critical components fail. | 3.214 | Vehicle to Vehicle (V2V) Safety applications shall notify the Driver when onboard components are offline |
| 3.215 | V2V Safety applications shall notify its owner/operator when onboard components are offline. | ||
| N3.110 | V2V Safety applications need to broadcast the performance of their vehicle in the transportation environment, to enable V2V applications that rely on knowing the location and/or trajectories of other vehicles. | 3.217 | V2V Safety applications shall broadcast the vehicle type, location, speed, heading, steering angle and brake system performance of host vehicles. |
| N3.111 | V2V Safety applications need to have a common time source so that location and projected positions may be synchronized. | 3.216 | V2V Safety applications shall have a common time source. |
Related Sources
- Vehicle Safety Communications Applications (VSC-A) Final Report, Final, 9/1/2011
Security
In order to participate in this application, each physical object should meet or exceed the following security levels.
| Physical Object Security | ||||
|---|---|---|---|---|
| Physical Object | Confidentiality | Integrity | Availability | Security Class |
| Security levels have not been defined yet. | ||||
In order to participate in this application, each information flow triple should meet or exceed the following security levels.
| Information Flow Security | |||||
|---|---|---|---|---|---|
| Source | Destination | Information Flow | Confidentiality | Integrity | Availability |
| Basis | Basis | Basis | |||
| Security levels have not been defined yet. | |||||