Link Type: Vehicle On-Board
Vehicle OBE --> Vehicle Databus:
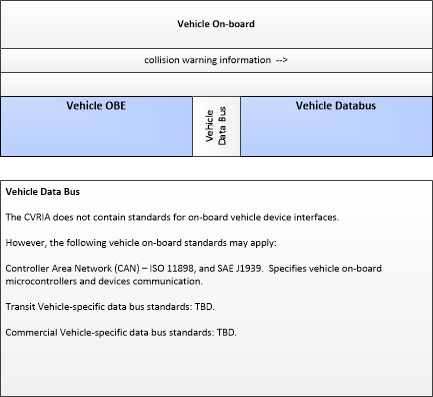
collision warning information
Definitions
collision warning information (Information Flow): Information provided to support computer-based intervention of vehicle controls. Analogous to driver warnings, these are warnings issued to on-board control systems of an impending collision or other situation detected by the Vehicle OBE that may require control intervention.
Vehicle OBE (Source Physical Object): The Vehicle On-Board Equipment (OBE) provides the vehicle-based processing, storage, and communications functions necessary to support connected vehicle operations. The radio(s) supporting V2V and V2I communications are a key component of the Vehicle OBE. This communication platform is augmented with processing and data storage capability that supports the connected vehicle applications.
In CVRIA, the Vehicle OBE includes the functions and interfaces that support connected vehicle applications for passenger cars, trucks, and motorcycles. Many of these applications (e.g., V2V Safety applications) apply to all vehicle types including personal vehicles, commercial vehicles, emergency vehicles, transit vehicles, and maintenance vehicles. From this perspective, the Vehicle OBE includes the common interfaces and functions that apply to all motorized vehicles.
Vehicle Databus (Destination Physical Object): The 'Vehicle Databus' represents the interface to the vehicle databus (e.g., CAN, LIN, Ethernet/IP, FlexRay, and MOST) that may enable communication between the Vehicle OBE and other vehicle systems to support connected vehicle applications. The vehicle system statuses and/or sensor outputs available on the databus will vary based on the equipment installed on the vehicle and availability on databus. System statuses and sensor outputs may include select vehicle systems and sensors such as accelerometers, yaw rate sensors, and GPS derived location and timing information. In CVRIA, this physical object is used to represent the onboard interactions between the Vehicle OBE and the other systems included in a host vehicle.
Note that the vehicle databus interface is not standardized across all vehicle classes. Also, some Vehicle OBE implementations will not have access to the vehicle databus. See 'Vehicle OBE' for more information.
Included In
This Information Flow is in the following Applications:
- Blind Spot Warning + Lane Change Warning
- Control Loss Warning
- Do Not Pass Warning
- Emergency Electronic Brake Light
- Emergency Vehicle Alert
- Forward Collision Warning
- Intersection Movement Assist
- Pedestrian in Signalized Crosswalk Warning
- Pedestrian Mobility
- Queue Warning
- Situational Awareness
- Tailgating Advisory
This Information Flow is in the following Application Objects:
Communication Diagrams
The communication diagram(s) can be viewed in SVG or PNG format and the current format is SVG. Switch to PNG format.
Characteristics
Architectural:
| None defined |
Security
This information flow triple is in the following applications with the following security levels.
| Information Flow Security | |||||
|---|---|---|---|---|---|
| Application | Confidentiality | Integrity | Availability | ||
| Basis | Basis | Basis | |||
| Pedestrian in Signalized Crosswalk Warning | Low | Moderate | Moderate | ||
| The information described in this message is the result of an analysis on broadcast data. It would not be difficult for a third party to produce the same message by listening to the broadcast information. | This information is used by automated control systems on the vehicle platform to decide whether to react automatically, for example by braking. We assume that the vehicle platform uses this as only one input to the decision and will also take input from front-facing sensors (for pedestrian detection), rear-facing sensors (to detect possible rear-ending), etc. We strongly recommend that this message is not used as the sole basis for action; if it were to be so used, the integrity requirement might need to be HIGH, but we do not consider this case in detail here. | This information is just one of a number of inputs to the vehicle platform that may be used to determine whether or not to take evasive action. | |||