Link Type: Short Range Wireless
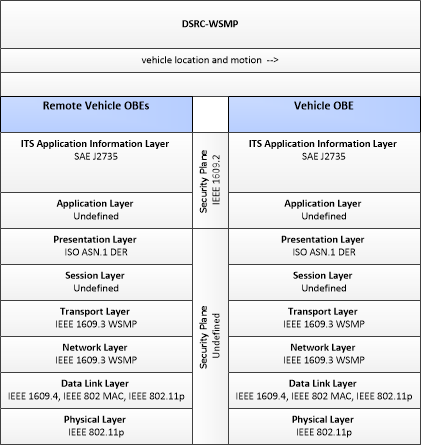
Remote Vehicle OBEs --> Vehicle OBE:
vehicle location and motion
This triple is bi-directional. See also
Vehicle OBE --> Remote Vehicle OBEs: vehicle location and motion
Definitions
vehicle location and motion (Information Flow): Data describing the vehicle's location in three dimensions, heading, speed, acceleration, braking status, and size.
Remote Vehicle OBEs (Source Physical Object): 'Remote Vehicle OBEs' represents other connected vehicles that are communicating with the host vehicle. This includes all connected motorized vehicles including passenger cars, trucks, and motorcycles and specialty vehicles (e.g., maintenance vehicles, transit vehicles) that also include the basic 'Vehicle OBE' functionality that supports V2V communications. In CVRIA, this object provides a source and destination for information transfers between connected vehicles. The host vehicle on-board equipment, represented by the Vehicle OBE physical object, sends information to, and receives information from the Remote Vehicle OBEs to model all connected vehicle V2V communications in CVRIA.
Vehicle OBE (Destination Physical Object): The Vehicle On-Board Equipment (OBE) provides the vehicle-based processing, storage, and communications functions necessary to support connected vehicle operations. The radio(s) supporting V2V and V2I communications are a key component of the Vehicle OBE. This communication platform is augmented with processing and data storage capability that supports the connected vehicle applications.
In CVRIA, the Vehicle OBE includes the functions and interfaces that support connected vehicle applications for passenger cars, trucks, and motorcycles. Many of these applications (e.g., V2V Safety applications) apply to all vehicle types including personal vehicles, commercial vehicles, emergency vehicles, transit vehicles, and maintenance vehicles. From this perspective, the Vehicle OBE includes the common interfaces and functions that apply to all motorized vehicles.
Included In
This Information Flow is in the following Applications:
- Blind Spot Warning + Lane Change Warning
- Connected Eco-Driving
- Control Loss Warning
- Cooperative Adaptive Cruise Control
- Do Not Pass Warning
- Eco-Approach and Departure at Signalized Intersections
- Eco-Cooperative Adaptive Cruise Control
- Forward Collision Warning
- Intersection Movement Assist
- Motorcycle Approaching Indication
- Pre-crash Actions
- Queue Warning
- Red Light Violation Warning
- Stop Sign Violation Warning
- Tailgating Advisory
This Information Flow is in the following Application Objects:
Communication Diagrams
The communication diagram(s) can be viewed in SVG or PNG format and the current format is SVG. Switch to PNG format.
Characteristics
Architectural:
| Characteristic | Value |
|---|---|
| Time Context | Now |
| Spatial Context | Adjacent |
| Acknowledgement | False |
| Cardinality | Broadcast |
| Initiator | Source |
Security
This information flow triple is in the following applications with the following security levels.
| Information Flow Security | |||||
|---|---|---|---|---|---|
| Application | Confidentiality | Integrity | Availability | ||
| Basis | Basis | Basis | |||
| Security levels have not been defined yet. | |||||